ASML-Foundation
Monday week 6
ADVANCED STATISTICS AND MACHINE LEARNING FOUNDATIONS
Introduction
What is the goal?
- Make rational inferences and decisions from data.
- Inference about unknown quantity $U$ given knowledge $K$:
- Current data $X$
- Other knowledge $K’$, e.g.:
- Previous data; physical theory; expert opinion.
- Decision $D$ about action to take, given this knowledge and the utility (or loss) consequent on the results.

Why is this goal important?
- World data volume is huge:
- Growing by 40% per year.
- 175ZB (25TB per person) by 2025.
- Most (95%) is images and video.
- E.g. earth observation satellite generates 1TB/day and there are thousands of them.
- Data usage is tiny:
- ~1% is analysed.
- Automatic data analysis is crucial.
Particle physics
- One-hour’s data for LHC = One-year’s data for FB.
- 70% of all data are classified by machine learning.
- 100% charged-particle tracks vetted by NNs.
- Achieving the sensitivity of a recent LHCb search would need 10 years of data without ML.
- Determination of particle energies. - Multivariate regression, boosted decision trees.
- Detection and classification of H → γγ decays. - Boosted decision trees.
- Categorization of neutrino events in the NOvA and MicroBooNE detectors. - Computer vision using CNNs.
How to do achieve the goal?
- Remarkably, there is essentially one way to do this correctly.
- Making inferences under uncertainty:
- Probability theory: ‘unique’ generalization of classical logic to uncertain propositions (Cox’s theorem).
- Making decisions under uncertainty:
- Decision theory: ‘unique’ method for rational choices (von Neumann–Morgenstern utility theorem).
- Together: Bayesian statistics.
And that’s it! Easy, right? Wrong!
- Data and decisions are often very complex and high-dimensional.
- E.g. satellite image: 200-million-dimensional vector or in a set of 10^500,000,000 elements.
- Cf 10^80 atoms in observable universe.
- Neural networks may have ~ 10^9 parameters.
- E.g. satellite image: 200-million-dimensional vector or in a set of 10^500,000,000 elements.
- Constructing a probability distribution that represents enough knowledge to be useful.
- Very difficult: most ‘images’ are just noise.
- Perhaps not possible ‘by hand’.
- Extracting information from this distribution.
- We need to integrate and optimize over these spaces.
Bayesian statistics in use
Structure
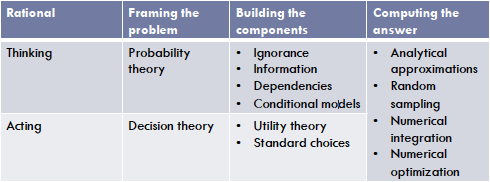
- Framework
- Bayesian statistics: the maths of rationality
- Cox’s theorem
- Von Neumann-Morgenstern theorem
- Framing the problem
- Making inferences
- Making decisions
- Building the components
- Ignorance
- Information
- Dependencies
- Conditional models
- Computing the answer
- The problem
- Integration
- Optimization
Framework
Bayesian Statistics: the mathematics of rationality
- Probability theory
- The unique method for rational thinking
- Decision theory
- The unique method for rational acting
- Bayesian statistics = PT + DT
- Why these ingredients?
- Cox’s theorem
- Von Neumann-Morgenstern theorem
Cox’s theorem
Cox’s theorem: postulates
Concerns plausibilities $P(A B)$ of propositions. - Propositions $A, B,$ etc. meaning ‘A is true’, etc.
$P(A B)$ is plausibility of A being true given that B is true.
- Axioms:
- Comparability
- The plausibility of a proposition is a real number (all plausibilities can be compared);
- Rationality
- Plausibilities should vary rationally with the variation of other plausibilities, including reducing to classical logic when all propositions are certain;
- Consistency
- If the plausibility of a proposition can be derived in many ways, all the results must be equal.
- Comparability
Cox’s theorem: unique solution
- Plausibilities satisfy:
- Range:
Certain truth is represented by $P(A B) = 1$ Certain falsehood is represented by $P(A B) = 0$.
- Negation:
$P(A B) + P(\neg A B) = 1$ - $\neg A$ is the proposition ‘A is false’.
- Conjunction (product rule):
$P(A, B C) = P(A B, C)P(B C)$ - $A, B$ is the proposition ‘A and B’.
- Range:
Cox’s theorem: consequences
Bayes theorem (from product rule)
$P(B|A, C) = \frac{P(A|B, C)P(B|C)}{P(A|C)}$Disjunction (sum rule)
$P(A \vee B|C) = P(A|C) + P(B|C) - P(A, B|C)$Partition (extending the conversation)
$P(A|C) = \sum_i P(A, B_i|C) = \sum_i P(A|B_i, C) P(B_i|C)$Often:
$P(A|C) = \sum_i P(A|B_i) P(B_i|C)$
Sum over all ‘paths’ from C to A.
Von Neumann-Morgenstern theorem
Von Neumann-Morgenstern theorem: postulates
- Concerns preferences ≼ between probability distributions on a set of rewards R.
- Known as ‘gambles’.
- $R \prec S$ means R is a worse gamble than S.
- Decisions $d \in D$ choose between gambles. 符号有错
- Axioms:
- Completeness
- For two gambles R and S, either $R \prec S$, $S \prec R$, or both ($R \sim S$).
- Transitivity
- If $R \prec S$ and $S \prec T$, then $R \prec T$.
- Continuity
- If $R \prec S \prec T$, then $\exists p \in [0,1]$: $S \sim pR + (1 - p)T$.
- Independence
- If $R \prec S$, then $\forall T: pR + (1 - p)T \prec pS + (1 - p)T$.
- Completeness
Von Neumann-Morgenstern theorem: unique solution
- There exists a function $L: {R} \rightarrow \mathbb{R}$, known as the ‘loss function’, that satisfies:
- $L(R) \geq L(S) \iff R \succ S$
- $L(pR + (1 - p)S) = pL(R) + (1 - p)L(S)$ 符号有错
- So, to decide between gambles: Minimize the expected loss
Von Neumann-Morgenstern theorem: consequences
- Remember $L(d, u)$? How do we get there?
- Rewards (i.e. consequences of decision) are pairs $(u’, u) \in W \times W$.
- $W$ are possible ‘states of the world’ (SoW).
- $u$ is state of the world before decision.
- $u’$ is state of the world after decision.
- $\tilde{L}(u’, u)$ measures how bad is the change in the SoW.
- Pick the decision $d \in \mathcal{D}$ that minimizes
$\langle \tilde{L} \rangle (d) = \sum_{u’} \tilde{L}(u’, u) P(u’ u, d, K)$.
- If $u’ = f(u, d)$, then we can instead minimize
$\langle L \rangle (d) = \sum_{u} L(d, u) P(u d, K)$.
Framing the problem
Making inferences
Making inferences: set-up
- Wish to make an inference about unknown $U$:
- Class of galaxy; location of neutrino tracks in image; energy of particle; disease diagnosis; guilt or innocence; …
- We have some knowledge $K$ already:
- The world is 3d (or 4d or 10d); physical laws; general knowledge; previous data; expert opinion; …
- The quantity of interest for inference is what we know about $U$ given $K$:
$P(U K)$ - We must construct this probability.
- How?!
Making inferences: Bayes theorem
- We have only the product and sum rules!
Use these to rework $P(U K)$ into probabilities that we can reasonably assign. - Often $K$ splits: current data $X$ and other knowledge $K’$.
- It is frequently much easier to construct:
$P(X U,K’)$: ‘causal’ data formation model. - E.g. image from object.
$P(U K’)$: ‘theoretical’ model of $U$. - E.g. physics.
Then $P(U X,K’) \propto P(X U,K’)P(U K’)$. - N.B. Normalization may be very difficult.
Making inferences: partition
- Sometimes other quantities $V$ can help:
- Make the connection between $U, X,$ and $K$ ‘causal’.
- Reduce dependence.
- There are several ways this can happen.
- Example:
$P(U K) \alpha \sum_V P(U V,K)P(V K)$ 有错
- Sometimes this is just an extra formal parameter.
- Sometimes it is a physical quantity.
- Future solar exposure, rainfall, and temperature, if plant growth is being predicted from fertilizer application and other known quantities.
- Alarm makes JohnCalls and MaryCalls independent.
Checkpoint
- Bayesian statistics:
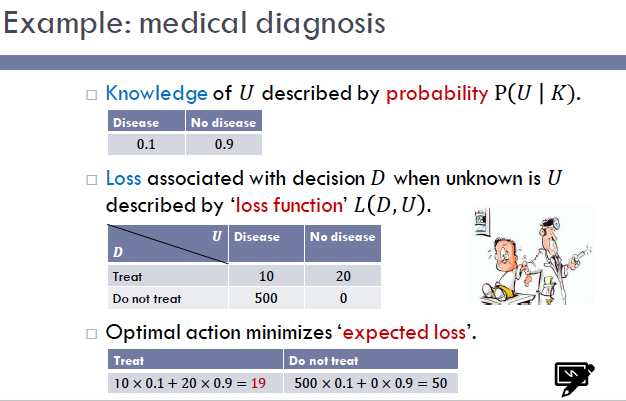
Probability theory is rational thinking: P(U K). - Decision theory is rational acting: L(D,U).
- Problems are how to:
Model and compute P(U K). - Compute and optimize
E[L](D).
Often useful to separate data X: P(U X,K). Use Bayes’ theorem: P(U X,K) ∝ P(X U,K)P(U K).
- Examples:
Medical diagnosis: X binary, U binary: P(U K) and P(X U,K) Bernoulli. Labour voting: X ∈ ℕ, U ∈ ℝ: P(U K) beta and P(X U,K) binomial.
- Often useful to introduce new unknown quantities to make the connection between U, X, and K easier to model:
- More causal or more independence: e.g. plant growth.
Making inferences: mean of Gaussian
- We have some data $x = { x_i }_{i \in n}$.
- We will model it using a Gaussian, with unknown mean $\mu$ and variance $v$.
- We want to know about $\mu$.
Quantity of interest is $P(\mu x, K)$. - Note that we are not estimating $\mu$.
Result: $\frac{(\mu - \bar{x})}{s x, K} \sim t(n - 1)$. - Familiar but quite different in meaning.
Making inferences: summaries
- Mode:
- No measure of uncertainty.
- Can be unrepresentative.
- Not invariant.
- Mean:
- No measure of uncertainty.
- Can be unrepresentative.
- Mean and variance:
- Can be unrepresentative.
- Credible intervals:
- Better at summarizing uncertainty, but no estimate.
- In high dimensions, all these become difficult to compute.
Checkpoint
- Often useful to introduce new unknown quantities to make the connection between $U, X,$ and $K$ easier to model:
- More causal or more independence: e.g. plant growth.
- Example:
- Introduce variance to make inference about mean.
- Also contrast with classical t-tests.
- Introduce variance to make inference about mean.
- Summaries of distributions:
- Pros and cons.
Making inferences: posterior predictive
- Another example of partition.
- Known $K$ is data $X = {X_i}$ and other info $K’$.
- Unknown $U$ is next piece of data $Y$.
Quantity of interest: $P(Y X,K)$. - Given a name: ‘posterior predictive distribution’.
- Just another special case.
- Missing information:
- Parameters of process.
- E.g. $P(\checkmark) = p$ and $P(\times) = 1 - p$.
- Parameters of process.

Parameter estimation in integrals: plug-in estimates
- Often arises not as part of a decision, but as an approximation to an integral.
- Posterior predictive distribution is usual example.
- Leads to ‘plug-in estimates’:
Estimate parameter $a$ from current data $P(a x,K)$, giving estimate $\hat{a}$. Treat it as the true value and plug into $P(y a,K)$ giving $P(y \hat{a},K)$.
Making decisions
Once we have $P(U K)$, we want to use it to: - Tell us about $U$.
- Make decisions.
- Hypothesis testing, model selection, classification:
- $U$ takes values in a finite set, often of two elements.
- Parameter estimation, regression:
- $U$ takes values in an uncountable set, often $\mathbb{R}^n$.
- Unlike in classical statistics, these are just special cases of the general Bayesian statistics framework.
Making decisions: hypotheses
需修改
- Often there are two (or more) competing hypotheses/classes/models, {H_i}.
- A classic statistical question is how to decide between them.
- Example:
- H_0: μ ∈ I ⊆ ℝ
- H_1: μ ∉ I ⊆ ℝ
- Cf term 1 data analysis and t distributions.
As always, quantity of interest: P(H_i x, K). - We saw a two-class example of medical diagnosis.
- Let us look at a simple approach to multi-class classification.
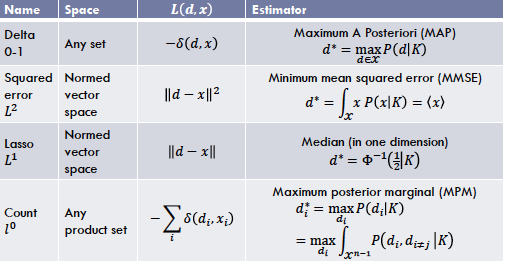
Making decisions: estimation
Often we want to give a single-value summary of a quantity $x \in X$.
This is called an ‘estimate’.- The decisions $D$ are:
- ‘Treat the value $d \in D \equiv X$ as if it were the true value’.
- Different to:
- Distribution summary: convey information succinctly.
- Plug-in estimate: approximate an integral.
We need a loss function $L: X \times X \rightarrow \mathbb{R}$.
This quantifies how bad it is to treat $d$ as the true value if it is in fact $x$.- Should always be bespoke, but in practice…
Building the components
The problem
- We have seen:
- The general framework for inferences and decisions.
- Some examples.
- More generally:
- How do we construct probability distributions that represent what we know?
- Here we will briefly describe several principles for doing this.
- Many examples will occur in the rest of the module.
Ignorance
- What if we know nothing about a quantity U?
- This is never true: we usually know at least a range.
- However it may be a useful limit.
- For a finite set A, easy:
- Ignorance means all elements are equivalent.
- Equivalence means invariance under all permutations.
Invariance implies uniform distribution: $P(a) = 1/ A $.
- But on a continuous set, e.g. ℝ, no distribution is invariant to all (even smooth) permutations.
- How to define ignorance?
- Solution: Jeffreys’ prior.
- Pullback of Fisher-Rao metric to space of parameters using the ‘likelihood’.
Convenience
- We have seen examples of conjugate priors.
Data $D$, unknown quantity of interest $U$, probability $P(U D, K)$. Then $P(U D, K) \propto P(D U, K)P(U K)$.
If, for the given $P(D U, K)$ and parametric family $P(U K)$: $P(U D, K)$ is in the same family, we say that $P(U K)$ is a conjugate prior for $P(D U, K)$.
- Very convenient for initial calculations.
- No longer as important with fast computers.
Information
- Sometimes we may know constraints on $P$: e.g. expectations of quantities, or averages over previous data.
- To avoid assumptions, $P$ should:
- Maximize our ignorance
- Be consistent with this knowledge.
- We need a measure of ignorance or uncertainty.
- Entropy $H(P)$ of a distribution $P$ on a space $X$ is the unique measure satisfying:
- Continuity under changes in $P_i$;
- Symmetry under permutations of $X_i$;
- Maximality at the uniform distribution;
- Additivity under coarsening of $X$.
- Formula:
- $H(P) = -\sum_x P(x) \ln P(x)$ or $H(P) = -\int_X P(x) \ln \rho(x)$
Maximum entropy
- Solution to problem:
- Maximize entropy subject to constraints.
- Examples:
- No constraints, finite set: ⇒ uniform distribution.
- Known mean and covariance ⇒ Gaussian.
- In general, under different constraints: any exponential family distribution:
- $P(x) \propto \exp(-\sum_a \lambda_a f_a(x))$
- Uniform, Gaussian, Beta, Gamma, …
Dependencies
- We may be able to characterize what one quantity tells us about another.
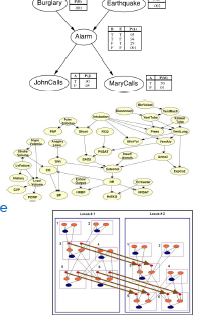
- This is usefully summarized in ‘graphical models’.
- Solutions:
- Directed graphical models capture ‘causal’ relationships and joint dependencies.
- Undirected graphical models capture spatio-temporal relationships and conditional independencies.

Directed graphical models
DGMs:
- Summarize dependency information.
- Provide a convenient ‘way to think’.
- Help to analyze models.
- Complex inferences can be expressed as graph operations, simplifying implementation.
Thus they enable:
- Construction of probability distributions that capture important dependencies.
- While keeping the models relatively simple (fewer parameters).
- Use of the resulting models in practice.
Directed acyclic graphs (DAG)
- Graph: $G = (V, E)$, where $E \subseteq V \times V$.
- Cycle: set of edges leading back to a vertex.
- Acyclic: containing no cycles.
- Terms:
- Parents of $v \in V$:
- $pa(v) = { u \in V : (u, v) \in E }$
- Children of $v \in V$:
- $ch(v) = { u \in V : (v, u) \in E }$
- Ancestors of $v \in V$ and descendants of $v$ similar.
- Parents of $v \in V$:
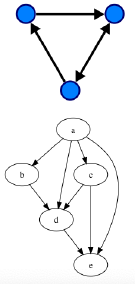
Probability distribution
- Each vertex $v \in V$ has an associated variable $x_v$.
- Probability distribution on $x = {x_v}$: \(P(x) = \prod_v P(x_v | pa(v))\)
- Advantage of structure:
Has $O( V A ^{P+1})$ parameters, where each vertex has $O(P)$ parents and takes values in $A$. Cf full model with $O( A V )$ parameters.

Examples
Naïve Bayes:
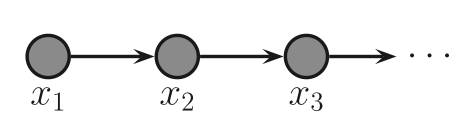
$P(c, \theta,X) = P(c) \prod_a P(X_a|\theta_a)P(\theta_a|c)$Markov chain:
$P(X) = \prod_a P(x_a|x_{a-1})$Second-order Markov chain:
$P(X) = \prod_a P(x_a|x_{a-1},x_{a-2})$Hidden Markov models:
$P(X,Z) = \prod_a P(X_a|Z_a)P(Z_a|Z_{a-1})$

Hierarchical models
- Simple graphical model:
- η → θ → D
$P(D, θ, η) = P(D θ)P(θ η)P(η)$
Can then calculate quantities of interest $P(U K)$: E.g. $P(θ D)$ or $P(η D)$.
- Example: modelling cancer rates.
Conditional independence
- Minimal ancestral subgraph of set $S \in V$:
- Smallest subgraph containing all ancestors of $S$.
- Moral graph:
- Connect all parents of each node.
- Drop the edge directions.
- $A \in V$ is independent of $B \in V$ given $S \in V$ iff:
- $S$ separates $A$ and $B$ in moralized minimal ancestral subgraph of $A \cup B$.
- Markov blanket:
$P(v V \setminus v) = P(v N(v))$ - $N(v) =$ neighbours of $v$ in moral graph.
Conditional models
Conditional (discriminative) models
- Sometimes it is hard to build joint models ‘by hand’:
$P(U X, K) \propto P(X U, K)P(U K) = P(X, U K)$
Solution: model $P(U X, K)$ directly. Pick a parameterized distribution $P(U a)$: - Parameter $a$ is often the mean.
- Make $a$ a function of $X$:
$P(U X, f, K) = P(U a = f(X))$.
- Pick a parameterized set of functions: $f(X) \in {f_W(X)}_{W}):
$P(U X, w, K) = P(U a = f_W(X))$.
Pick a prior for $w, P(w K)$. Compute $P(U X, K) = \int_W P(U X, w, K)P(w K)$: - In practice, $K$ contains previous data ${(U_i, X_i)}$.
- Use plug-in estimates: approximate integral by estimating the parameters $w$ using MAP:
$P(w {U, X}, K) \propto P({U} {X}, w, K)P(w K) \propto P({U} {f_W(X)})P(w K)$.
- Classic examples: linear and logistic regression.
Problem:
- Hard to incorporate prior knowledge about $U$.
Solution:
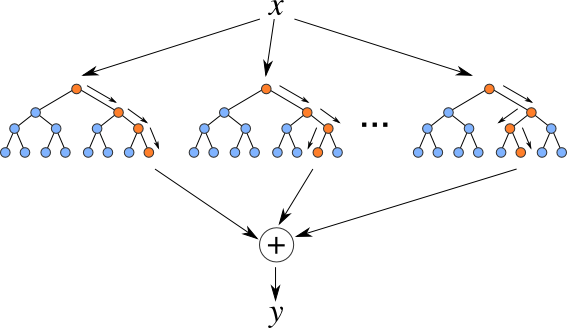
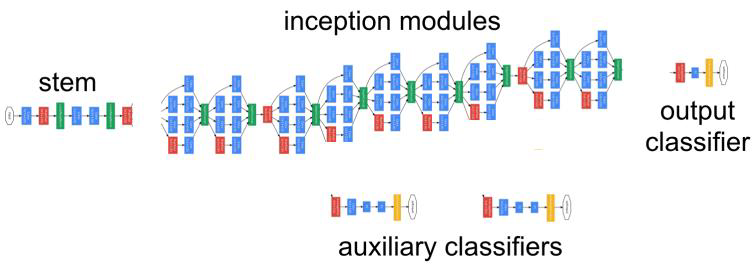
- Generic models with many parameters to capture dependencies.
- Large amounts of data needed to learn all these parameters.
- Forests, deep neural networks, …
Can also be used for $P(X U, K)$.
Computing the answer
The problem
- $U$ is often lies in a very high-dimensional space.
- We need to:
Understand what $P(U K)$ tells us about $U$. - Calculate expectations, e.g. of the loss function.
- Optimize to find estimates, etc.
- How to integrate and optimize over such spaces?
- Right now, we drop a few names.
- We will look in more detail at Monte Carlo methods.
Integration
- Analytical approximations
- Laplace approximation and other expansions (loop,…).
- Numerical approximations
Variational: fit a simpler distribution to $P(U K)$. - Gaussian (‘variational Bayes’)
- Completely factorized (mean field approximation)
- Pairwise interactions (Bethe approximation)
- Message-passing algorithms.
- Numerical integration
- Monte-Carlo methods, in particular many flavours of Markov-chain Monte-Carlo.
Monte Carlo approximation
- We often need to compute expectations:
$E[f] = \int_X f(x) P(x K)$
- Examples:
- Estimation (mean, MMSE estimate).
Posterior predictive distribution: $f(x) = P(c x)$.
- Use samples ${x_i}$ from $P$ to approximate $E[f]$:
- $\bar{f} = \frac{1}{n} \sum_i f(x_i)$
- $E[\bar{f}] = E[f] ; \, Var[\bar{f}] = \frac{1}{n} Var[f]$.
- But need independent samples from $P$. How?
- What does this even mean?
Sampling
- Needed: a method to sample from $U([0, 1])$.
- These are pseudo-random number generators.
- There is a lot of theory, but we will just assume we have one.
Zero dimensions (discrete distributions).
- One dimension
- Inverse transform sampling.
- Low dimensions
- Rejection sampling.
- Importance sampling.
- High dimensions
- Markov Chain Monte Carlo (MCMC).
- Low-dimensional sampling is also important for high dimensions:
- Sampling one (or a few) variables at a time.
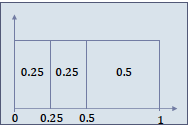
Discrete distributions
- Finite set $A$, with probabilities $P(a)$ for $a \in A$.
Order $A$ arbitrarily, giving $a_1, a_2, \ldots, a_{ A }$. - Define $P_i = \sum_{j=1}^{i} P(a_i)$, with $P_0 = 0$.
Divide ([0,1]) into intervals ([P_{i-1}, P_i], i \in [1.. A ]). - Let $P(x) = dx$.
- Then $P(x \in [P_{i-1}, P_i]) = P_i - P_{i-1} = P(a_i)$.
- Algorithm
- Sample $x$ from $U([0,1])$.
- Return $a_i$ such that $x \in [P_{i-1}, P_i]$.
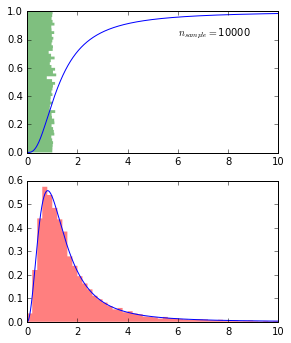
Inverse transform sampling
We want to sample from:
$P_Y(y) = dy \rho_Y(y)$.Recall:
If $P(x) = dx$ i.e. $U([0,1])$, then under a transformation $y = \epsilon(x)$:
$P_Y(y) = dy |(\epsilon^{-1})’(y)|$.Algorithm
- Find $\epsilon^{-1}(y) = \int_0^y dz \rho_Y(z) = F_Y(y)$, the cdf of $y$.
- Invert it to find $\epsilon$.
- Sample ${x_i}$ from $U([0,1])$.
- Compute ${y_i} = {\epsilon(x_i)}$.
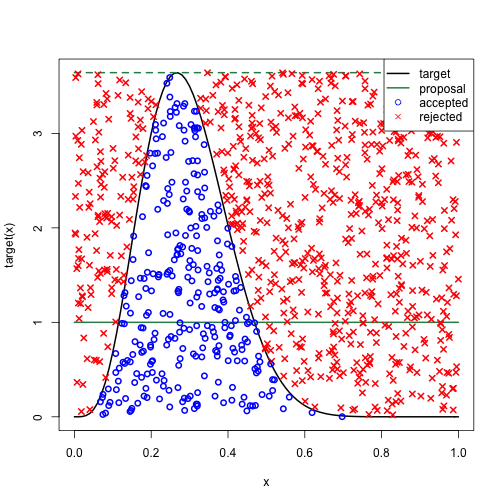
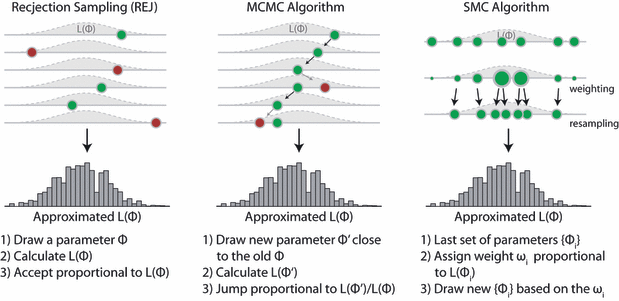
Rejection sampling
- Idea:
- Probability is area under density.
- Sample in 2D and throw away y value.
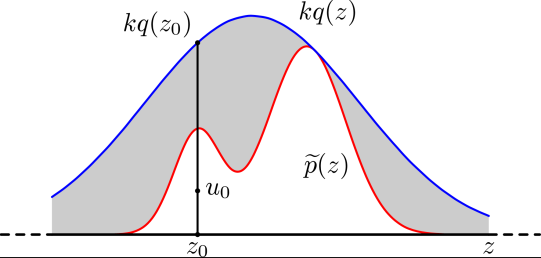
- Want to sample from $p = \frac{\tilde{p}}{Z_p}$, but only know $\tilde{p}$.
- Suppose:
- We can sample from another distribution $q$.
- There is a $k$ such that $kq \geq \tilde{p}$.
- Suppose:
- Algorithm
- Sample $z_0$ from $q$.
- Sample $u_0$ from $U([0, kq(z_0)])$.
- If $u_0 < \tilde{p}(z_0)$, keep $x = z_0$; else reject.
Markov Chain Monte Carlo
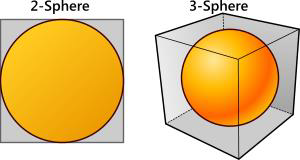
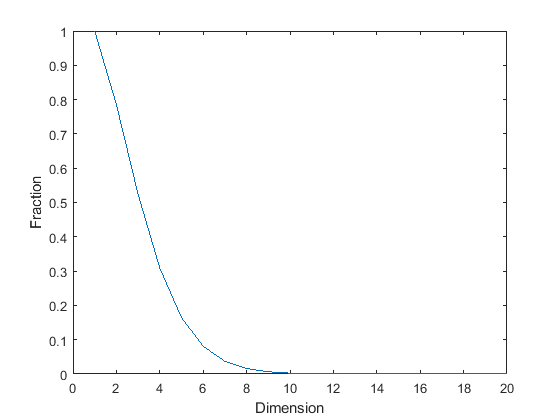
- In high dimensions, it is very difficult to apply rejection sampling:
- Almost all samples are rejected.
- E.g. hypersphere in cube.
- Abandon independent samples:
- Generate dependent samples using Markov chains.
Bad: more samples now needed for given variance.
- Good: very flexible, so can sample from almost any distribution.
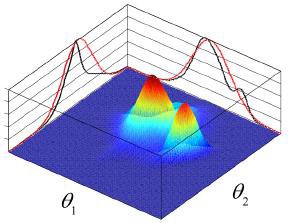
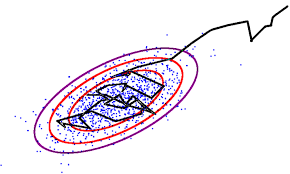
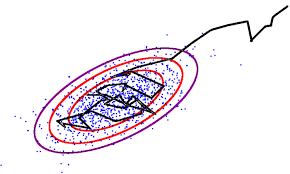
Intuition
- Probability distribution $P(x)$ on space $X$.
- Random walk in $X$ generates a series of samples.
- Ensure that the relative frequencies of values in this chain are the same as $P(x)$.
- Note that successive values are dependent.
- Chain depends on initial point:
- Need to eliminate burn-in.
- Variance does not go down like $1/n$:
- Need to estimate effective sample size.
- Need thinning to achieve independence, but not really a good idea.
- Chain depends on initial point:
Markov chains 1
- A Markov chain is a probability distribution on variables {xi ∈ Ai}i∈ℕ.
- Markov property:
P(xi x<i) = P(xi xi-1). - Independence of past given previous value.
Define P(xi xi-1) = Ti(xi, xi-1). - Transition probability.
- Stationary/homogeneous:
- Ai = ℵ
- Ti(xi, xi-1) = T(xi, xi-1) = T(x’, x).
Markov chains 2
Marginal probabilities related by transition probability:
$P(x_{i+1}) = \sum_{x_i} P(x_{i+1}|x_i)P(x_i)$All $x$ in same space: think of evolving distribution:
$\rho_{i+1}(x) = \sum_{x’} T(x, x’)\rho_i(x’)$Matrix multiplication:
$\rho_{i+1} = T \rho_i$After $N$ steps:
$\rho_{i+N} = T^N \rho_i$
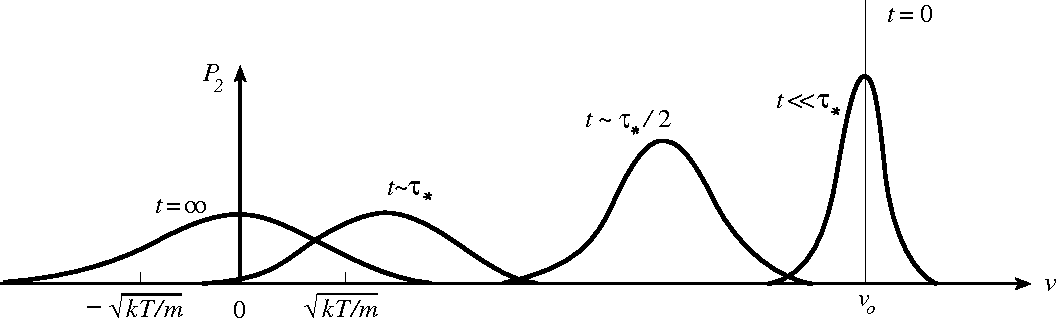
Markov chains 3
- Under certain conditions, the evolution converges to an ‘invariant’, ‘stationary, or ‘equilibrium’ distribution π that does not change:
- Chain converges: π = (\lim_{N \to \infty} T^N \pi_0)
- Invariant: π = Tπ
- If we sample from successive distributions in the chain, and wait long enough, our samples will become samples from π.
- So if we can construct a chain with stationary distribution the one from which we want to sample, i.e. such that π = P, we are done!
- How can we construct such Markov chains?
Gibbs sampling
Variable $x = {x_a} \in \mathcal{A} = \prod_a A_a$. Let $ a = d$. - Could be components, or different variables entirely.
- Could be groups of variables.
Sample from conditional distributions $P(x_a x_{\backslash a})$, updating one variable at a time: - For $a = 1:d$
Sample $x’_a$ from $P(x_a x)$ - Set $x_a = x’_{a}$
- Return $x$
- Go to 1
- For $a = 1:d$
- How do we know it works?
Gibbs sampling: the good
- Only requires conditional distributions. Often:
- Easy to find (at least unnormalized)
- Especially for graphical models, for which conditionals are either obvious or easy to calculate.
- Easy to sample from as low- (often one-) dimensional.
- Easy to find (at least unnormalized)
- No tuning parameters:
- Can effectively be automated (Winbugs, Jags)
Gibbs sampling: the not-so-good
- Gibbs sampling can easily be reducible because you cannot move diagonally.
- But if the conditional distributions are all positive, then the chain is irreducible.
- Sampling can be slow, for two reasons:
- You cannot move diagonally.
- Step size vs distribution size.
Metropolis-Hastings
- Splits sampling into two steps:
Propose a new state $x^$ according to some proposal distribution $Q(x^ x)$. - Accept proposal $x’ = x^*$, or stay put $x’ = x$.
- To achieve detailed balance:
- Accept with probability $\alpha = \min(1, R(x^*, x))$, where:
- If proposal is symmetric $R(x^, x) = \frac{\pi(x^)}{\pi(x)}$:
- Metropolis algorithm.
- How do we know it works?
Metropolis-Hastings: the good and bad
Good
- Incredibly flexible: π can be more or less anything.
- Only ratios of π are needed, so normalization is not required.
Bad
- Choosing good proposal distributions is not always easy.
- Proposal distributions often have tuning parameters that affect acceptance probability and mixing.
- These must usually be chosen via trial and error.
Metropolis-Hastings: common proposals
Gaussian centred on $x$, with some (co)variance:
$Q(x’|x) = N(x’; x, \Sigma)$.
‘Random walk Metropolis-Hastings’.Independence sampler:
$Q(x’|x) = Q(x’)$.Gibbs sampler:
$Q(x’|x) = P(x’a|x{\setminus a})\delta(x’a, x{\setminus a})$
$P(a) = 1$.
Metropolis-Hastings: Gaussian proposals
- Small step size bad:
- Can fail to explore space.
- Many steps to generate a given (effective) number of samples because of high correlation.
- Large step size bad:
- Many steps to generate a given number of samples due to large rejection probability.
- Variance adjusted using pilot runs:
- Target 25% – 40% acceptance rate.
Metropolis-Hastings: variants
- Mixtures:
- Pick one of a number of valid proposals at random.
- Data-driven:
Predictors $Q_k(x_k f_k(D))$ trained on data $(x,D)$ generated from model. $Q(x’ x) = p_0 Q_0(x’ x) + \sum_k p_k Q_k(x_k f_k(D))$
- Adaptive:
- Change Gaussian proposal $\Sigma$ over iterations according to empirical covariance.
Reversible-jump (RJ-MCMC)
- Hamiltonian MCMC
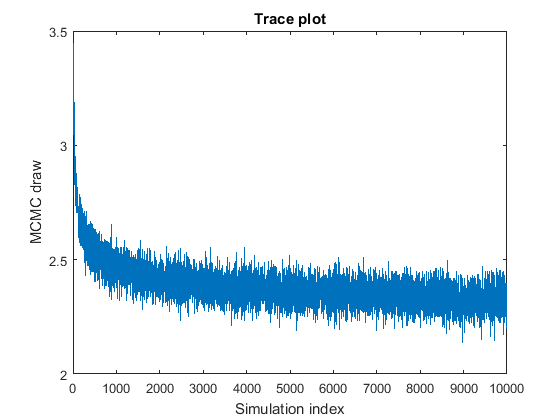
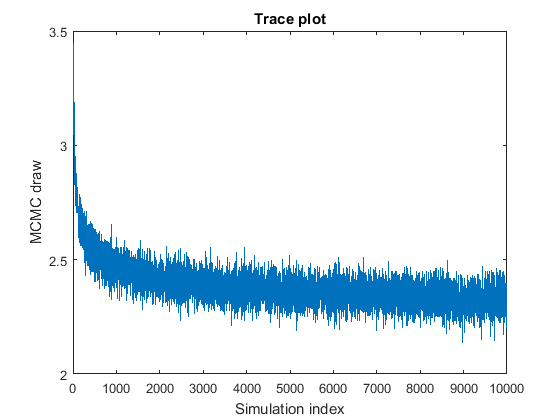
MCMC: Practicalities
- Acceptance:
- Target ~ 40% acceptance by tuning parameters via pilot runs.
- Burn-in:
- Eye-balling traces is still the most reliable method.
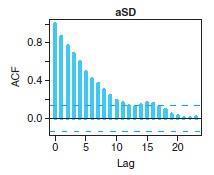
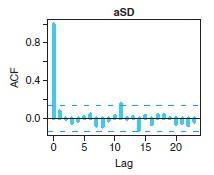
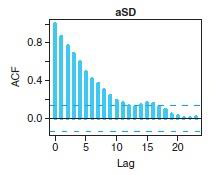
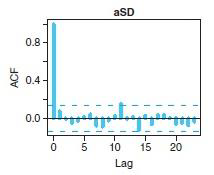
- Autocorrelation and thinning:
- Function acf in R.
- Effective sample size:
- Package coda in R.
Summary of methods
Recent application: MCMC GANs
- Discriminator Rejection Sampling
- Samaneh Azadi, Catherine Olsson, Trevor Darrell, Ian Goodfellow, Augustus Odena
- (Submitted on 16 Oct 2018 (v1), last revised 26 Feb 2019 (this version, v3))
- Metropolis-Hastings Generative Adversarial Networks
- Ryan Turner, Jane Hung, Eric Frank, Yunus Saatci, Jason Yosinski
- (Submitted on 28 Nov 2018 (v1), last revised 17 May 2019 (this version, v2))
Optimization
- Gradient ascent.
- Hill climbing.
- Stochastic gradient ascent.
- Add noise to avoid local maxima.
- Explicitly.
- Implicitly by training using subsets of the data.
- Decrease noise (learning rate) slowly.
- Add noise to avoid local maxima.
- Simulated annealing.
- Sampling e.g. MCMC.
- Decrease ‘temperature’ slowly.
- Message-passing algorithms.
- Max-sum instead of sum-product.