2025-09-08-Digital and Optimal Control 2 Analysis of discrete-time systems using *z*-transforms
ELEC-E8101: Digital and Optimal Control 2 Analysis of discrete-time systems using z-transforms
In the previous lecture. . .
We
- Discussed the importance of feedback control
- Listed, advantages and disadvantages of digital control
- Discussed the implications of converting continuous-time models into discrete-time models
- Derived and used the properties of Laplace transforms to represent continuous-time systems
Questions and feedback from last week
- Good recap and reminder of what parts of the memory need to be refreshed
- In-class exercise and examples were good
- There could have been some hints after some time in the self study exercise
- A bit slower
- What is the difference between the design principles?
Discrete-time controller design
There are 2 main design approaches
Discretize the analog controller
Discretize the process and do the entire design in discrete time
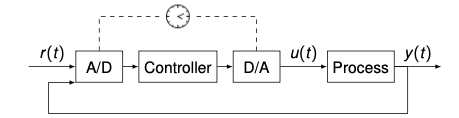
Approach 1
Discretize the analog controller
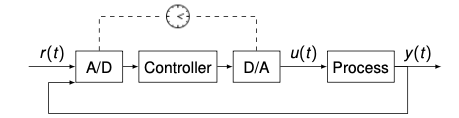
- Assume we have a transfer function $G(s)$ given in the Laplace domain that describes our process
- We now design a controller $K(s)$ in the Laplace domain
- Then we discretize this controller so we can implement it on a microcontroller
- This is what we did in the disk drive example last week!
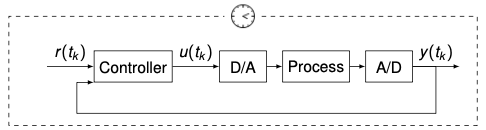
Approach 2
Discretize the process and do the entire design in discrete time
- Assume again we have a model of the process in the Laplace domain, $G(s)$
- We now discretize the process (how? → next week), i.e., we get a transfer function $H(z)$ in the z-domain (we will discuss the z-domain today)
- Then, we design the controller $K(z)$ directly using the discrete-time transfer function
Learning outcomes
By the end of this lecture, you should be able to:
- Explain the importance of z-transforms for analyzing discrete-time systems
- Derive and use the properties of z-transforms
- Represent discrete-time sequences in z-transform
- Analyze discrete-time systems
- Define the transfer function of a linear time-invariant (LTI) system
- Determine whether or not the transfer function is causal and stable
Recap and introduction
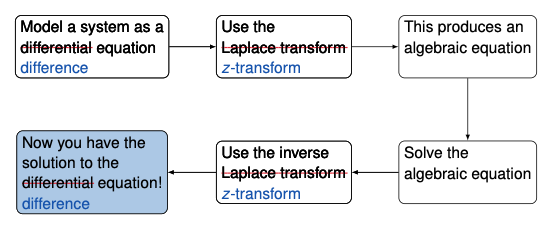
- In the last lecture, we discussed the Laplace transform
- It turns differential equations into algebraic terms with respect to s
- For discrete-time system, we use the z-transform
- z-transform turns difference equations into algebraic terms with respect to z
Introduction
- Analog systems are designed and analyzed with the use of Laplace transforms
- Discrete-time systems are analyzed using a similar technique, called z-transforms
Historical note During and after World War II, a lot of activity was devoted to analysis of radar systems. These systems are naturally sampled because a position measurement is obtained once per antenna revolution. First steps by Hurewicz (1947) – later defined as the z-transform by Ragazzini and Zadeh (1952).
- Basic idea the same for Laplace and z-transforms:
- After determining the impulse response of the system, the response to any other input signal can be extracted by simple arithmetic operations
- The behavior and the stability of the system can be predicted from the zeros and poles of the transfer function
Recap: why are we interested in digital control?
- Many application examples use microcontrollers, i.e., work in discrete time: robots, cars, chemical processes, …
- But the underlying dynamics are continuous…
- → We need to discretize them, which we will discuss in the next lecture
- For today, let’s consider a system that naturally evolves in discrete time
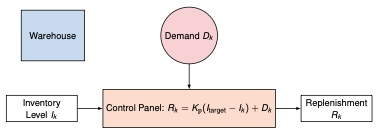
Digital inventory management system
- Consider a system that tracks and controls the inventory of items in a warehouse
- The inventory levels $I_k$ are updated at discrete time intervals $k \to k + 1$ (e.g., daily or weekly), and decisions about replenishments $R_k$ are made at these intervals based on the current inventory level, the target inventory level $I_{\text{target}}$, and demand $D_k$
- We have
\(I_{k+1} = I_k - D_k + R_k = I_k - D_k + K_p (I_{\text{target}} - I_k) + D_k\) - How do we need to choose $K_p$ to have $I_k \to I_{\text{target}}$ as $k \to \infty$?
From Laplace transform to z-transform
The Laplace transform is given by
\(\mathscr{L}\{x(t)\} := X(s) = \int_{t=-\infty}^{+\infty} x(t) e^{-st} \, dt\)s is a complex number and substituting $s = \sigma + j\omega$, we get
\(X(\sigma, \omega) = \int_{t=-\infty}^{+\infty} x(t) e^{-(\sigma + j \omega) t} \, dt\)Step 1: change the signal from continuous time to discrete, i.e., $x(t) \rightarrow x_k$
\(X(\sigma, \omega) = \sum_{k=-\infty}^{+\infty} x_k e^{-(\sigma + j \omega) k}\)Step 2: define $r = e^\sigma$ and $z = r e^{j \omega}$ to obtain the standard form of the z-transform:
\(\mathcal{Z}(x_k) := X(z) = \sum_{k=-\infty}^{+\infty} x_k z^{-k}\)
Example: discrete-time impulse
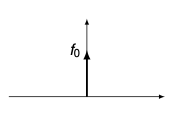
- The sequence ${ f_0, 0, 0, \ldots }$ is an impulse (pulse) with strength $f_0$, i.e.,
where
\[\delta_k = \begin{cases} 1 & \text{if } k = 0 \\ 0 & \text{if } k \neq 0 \end{cases}\]- Find the $z$-transform of $f_k$
Example: discrete-time impulse – solution
- Write down the definition of the z-transform
- Insert the discrete-time impulse
- Insert definition of the impulse
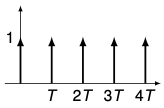
Example: discrete-time (unit) step function
The sequence ${1, 1, 1, \ldots }$ is a step function with strength 1, i.e.,
\(u_k = \begin{cases} 1 & \text{if } k \geq 0 \\ 0 & \text{if } k < 0 \end{cases}\)- The absolute time at instant $k$ is $kT$, where $T$ is the sampling interval
- Find the z-transform of $u_k$
Example: discrete-time (unit) step function – solution
- Start again from the definition of the z-transform and insert the step function
→ Geometric series
- General geometric series:
Converges if $ r < 1$. Then:
- In our case:
| → If $\left | z^{-1} \right | < 1$, we have |
Example: discrete-time exponential function
- Now, we consider the function
where
\[u_k = \begin{cases} 1 & \text{if } k \geq 0 \\ 0 & \text{if } k < 0 \end{cases}\]- Find the z-transform of $x_k$
Example: discrete-time exponential function – solution
- As before:
→ Again geometric series
Converges if $\left a z^{-1} \right < 1$. Then
- And the region of convergence (ROC) is
More examples
Consider the function
\(x_k = -a^k u_{-k-1}, \quad a \in \mathbb{R}\)
where
\(u_k = \begin{cases} 1 & \text{if } k \geq 0 \\ 0 & \text{if } k < 0 \end{cases}\)Find the z-transform of $x_k$
More examples – solution
As before
\(\mathcal{Z}(x_k) = \sum_{k=-\infty}^\infty -a^k u_{-k-1} z^{-k} = -\sum_{k=-\infty}^{-1} (a z^{-1})^k = -\sum_{k=1}^\infty (a^{-1} z)^k = 1 - \sum_{k=0}^\infty (a^{-1} z)^k\)Limit exists if $\big| a^{-1} z \big| < 1$. Then,
\(X(z) = 1 - \frac{1}{1 - a^{-1} z} = \frac{z}{z - a}\)And the region of convergence is
\(\mathrm{ROC}_x = \{ z \in \mathbb{C} : |a^{-1} z| < 1 \}\)
In-class exercise
Find the z-transform and region of convergence (ROC) of the following difference equation
\(x_k = a^k u_k - b^k u_{-k-1}, \quad a, b \in \mathbb{R}\)
where
\(u_k = \begin{cases} 1 & \text{if } k \geq 0 \\ 0 & \text{if } k < 0 \end{cases}\)When is the ROC an empty set?
In-class exercise – solution
- We already found the z-transforms of the two terms in the previous examples
→ We can exploit the linearity of the z-transform (we will prove it in two slides):
Region of convergence: we need $\left az^{-1}\right < 1$ and $\left b^{-1}z\right < 1$ Thus, we have $ z > a $ and $ z < b $ If $ a > b $: $\text{ROC}_x = \emptyset$ If $ a < b $: $\text{ROC}_x = { z \in \mathbb{C} : a < z < b }$
Right-sided z-transforms
Right-sided z-transforms are defined as
\(\mathcal{Z}_{+}(x_k) := \mathcal{Z}(x_k u_k)\)
where
\(u_k = \begin{cases} 1 & \text{if } k \geq 0 \\ 0 & \text{if } k < 0 \end{cases}\)That is,
\(\mathcal{Z}_{+}(x_k) := X_{+}(z) = \sum_{k=0}^{+\infty} x_k z^{-k}\)We will mostly use right-sided z-transforms from now on
Properties of z-transforms
- Last week, we discussed different properties of Laplace transforms
- For example, linearity, or that the Laplace transform of the time derivative of f(t) is sF(s) − f(0)
- The z-transform has similar properties
Linearity
- Let $x_k$ be the linear combination of $x_k^{(1)}$ and $x_k^{(2)}$ with ROC $\Pi_1$ and $\Pi_2$
- Then:
- The ROC is then $\Pi \supseteq \Pi_1 \cap \Pi_2$. Note that $\Pi$ can be bigger
Example
Consider the function
\(x_k = a^k u_k - a^k u_{k-1}, \quad a \in \mathbb{R}\)These are two exponential functions, thus,
\(\Pi_1 = \Pi_2 = \{ z \in \mathbb{C} : | a z^{-1} | < 1 \}\)For the sum, we have
\(x(z) = \sum_{k=-\infty}^{\infty} (a^k u_k - a^k u_{k-1}) z^{-k} = \sum_{k=0}^{\infty} (a z^{-1})^k - \sum_{k=1}^{\infty} (a z^{-1})^k = 1\)Therefore,
\(\Pi = \{ z \in \mathbb{C} \supset \Pi_1 \cap \Pi_2 \}\)
Properties of right-sided z-transforms
Delays
\[\mathcal{Z}_+\{x_{k-k_0}\} = z^{-k_0} \left( X_+(z) + \sum_{m=-k_0}^{-1} x_m z^{-m} \right), \quad \text{ROC}_x \text{ except } z=0\]Proof
\[\begin{aligned} \mathcal{Z}_+\{x_{k-k_0}\} &= \sum_{k=0}^{\infty} x_{k-k_0} z^{-k} \\ &= \sum_{m=-k_0}^{\infty} x_m z^{-(m+k_0)}, \quad m := k - k_0 \\ &= z^{-k_0} \left( \sum_{m=0}^{\infty} x_m z^{-m} + \sum_{m=-k_0}^{-1} x_m z^{-m} \right) \end{aligned}\]Prediction
\[\mathcal{Z}_{+}\{x_{k+k_0}\} = z^{k_0} \left( X_+(z) - \sum_{m=0}^{k_0-1} x_m z^{-m} \right), \quad \text{ROC}_x \text{ except } z = \infty\]Proof
\(\begin{aligned} \mathcal{Z}_{+}\{x_{k+k_0}\} &= \sum_{k=0}^\infty x_{k+k_0} z^{-k} \\ &= \sum_{m=k_0}^\infty x_m z^{-(m-k_0)}, \quad m := k + k_0 \\ &= z^{k_0} \sum_{m=k_0}^\infty x_m z^{-m} = z^{k_0} \left( \sum_{m=0}^\infty x_m z^{-m} - \sum_{m=0}^{k_0-1} x_m z^{-m} \right) \end{aligned}\)
Properties of z-transforms
Differentiation in the z-domain
\[\{ x_k \xleftrightarrow[z]{} X(z), \text{ROC}_x \} \implies \left\{ k x_k \xleftrightarrow[z]{} -z \frac{d}{dz} X(z), \text{ROC}_x, \text{ possibly except } z=0 \right\}\]Proof
\[-z \frac{d}{dz} X(z) = -z \frac{d}{dz} \left( \sum_{k=0}^{\infty} x_k z^{-k} \right)\] \[= z \sum_{k=0}^{\infty} k x_k z^{-k-1}\] \[= \sum_{k=0}^{\infty} k x_k z^{-k} \quad \underbrace{}_{\mathcal{Z} \{ k x_k \}}\]Initial value theorem (IVT)
\[x_0 = \lim_{z \to \infty} X(z)\]Proof
\[X(z) = \sum_{k=0}^{\infty} x_k z^{-k} = x_0 \underbrace{z^{-0}}_{=1} + x_1 \underbrace{z^{-1}}_{\to 0 \text{ as } z \to \infty} + \ldots\] \[\lim_{z \to \infty} X(z) = x_0\]Final value theorem (FVT): for a causal stable (all poles in the unit circle) system, we have
\[x_{\infty} := \lim_{k \to \infty} x_k = \lim_{z \to 1} (z - 1)X(z)\]Proof
We can write $x_k$ as
Now we take the limit
\[\lim_{k \to \infty} x_k = \lim_{k \to \infty} \lim_{z \to 1} \left( (x_0 - x_{-1})z^0 + (x_1 - x_0)z^{-1} + (x_2 - x_1)z^{-2} + \ldots \right)\] \[= \lim_{z \to 1} \sum_{k=0}^{\infty} (x_k - x_{k-1}) z^{-k} = \lim_{z \to 1} \left( X(z) - X(z-1) \right)\] \[= \lim_{z \to 1} \left( X(z) - z^{-1} X(z) \right)\]| Property | Expression |
|---|---|
| Linearity | $\mathcal{Z}\left(ax_k^1 + bx_k^2\right) = a \mathcal{Z}\left(x_k^1\right) + b \mathcal{Z}\left(x_k^2\right)$ |
| Delays | $\mathcal{Z}+{x{k-k_0}} = z^{-k_0} \left( X_+(z) + \sum_{m=-k_0}^{-1} x_m z^{-m} \right)$ ROC$_x$ except $z=0$ |
| Predictions | $\mathcal{Z}+{x{k+k_0}} = z^{k_0} \left( X_+(z) - \sum_{m=0}^{k_0-1} x_m z^{-m} \right)$ ROC$_x$ except $z=\infty$ |
| Differentiation | ${x_k \xleftrightarrow{\mathcal{Z}} X(z), \text{ROC}_x} \implies \left{ kx_k \xleftrightarrow{\mathcal{Z}} -z \frac{d}{dz} X(z), \text{ROC}_x, \text{ possibly except } z=0 \right}$ |
| Initial value theorem | $x_0 = \lim_{z \to \infty} X(z)$ |
| Final value theorem | $x_\infty := \lim_{k \to \infty} x_k = \lim_{z \to 1} (z - 1) X(z)$ |
Inverse z-transform
- Implementing the z-transform takes us from the discrete-time domain to the z-domain
- The opposite procedure is the inverse z-transform
- Derivation of the inverse z-transform via the Fourier transform (𝓕)
Now, we want to replace $\omega$ with z
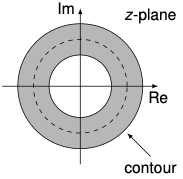
\(z = re^{j\omega}\) \(\mathrm{d}z = jre^{j\omega} \mathrm{d}\omega = jz \mathrm{d}\omega\) \(\implies \mathrm{d}\omega = \frac{1}{j} z^{-1} \mathrm{d}z\) with $|z| = r$ and $\omega = 0 \dots 2\pi$Therefore,
\(x_k = \mathcal{Z}^{-1}\{X(z)\} = \frac{1}{2 \pi j} \oint X(z) z^{k-1} \mathrm{d}z\)Anti-clockwise integration over a closed contour with the ROC of $X(z)$ which includes the intersection of real and imaginary axes of the $z$-complex plane
- Calculation of the integral is quite hard!
- Usually, instead of calculating, we look up the transforms in a table
- These tables only contain some basic functions and cannot cover all cases
- 3 methods for calculating the inverse transform of a function $X(z)$
- Method of power series expansion
- Method of partial fraction expansion
- Method of complex integration (via the residue theorem)
Partial fraction expansion
Example: find $x_k$ from $X(z)$ given by
\(X(z) = \frac{1 + 0.5 z^{-1} - 0.32 z^{-2}}{(1 - 0.5 z^{-1})(1 - 0.2 z^{-1})^2}, \quad |z| > 0.5\)We perform partial fraction expansion
\(X(z) = \frac{A}{1 - 0.5 z^{-1}} + \frac{B + C z^{-1}}{(1 - 0.2 z^{-1})^2}\)From the 2 equations above, we get
\(A (1 - 0.2 z^{-1})^2 + (B + C z^{-1})(1 - 0.5 z^{-1}) = 1 + 0.5 z^{-1} - 0.32 z^{-2}\)For $z^{-1} = 2$:
\(0.36 A = 0.72 \implies A = 2\)For $z^{-1} = 0$:
\(A + B = 1 \implies B = 1 - A = 1 - 2 \implies B = -1\)For $z^{-1} = 1$:
\(0.64 A + 0.5 B + 0.5 C = 1.18 \implies C = 2 (1.18 - 1.28 + 0.5) \implies C = 0.8\)After doing the partial fraction expansion
Power series expansion
- Example: find $x_k$ from $X(z)$ given by
- Performing power series expansion
Discrete-time systems
- Example: a first-order difference equation
and $\delta_k$ is the impulse given by
\[\delta_k = \begin{cases} 1 & \text{if } k = 0 \\ 0 & \text{if } k \neq 0 \end{cases}\]- Find a solution for $y_k$!
Discrete-time systems – example solution
- Let’s make some calculations directly from the equation:
Results: pulse sequence
\[\{a^k\}, k = 0,1,2,\ldots\] \[\mathcal{Z}(y_k) = \sum_{k=1}^{\infty} a^{k-1}z^{-k} = a^{-1} \sum_{k=1}^{\infty} (az^{-1})^{k}\] \[= a^{-1} \frac{az^{-1}}{1 - az^{-1}} = \frac{1}{z - a}, \quad |az^{-1}| < 1\]- Alternative:
Discrete-time systems
In general, we can describe a discrete-time system as follows
\[X(z) \xrightarrow{x_k} H(z) \xrightarrow{y_k} Y(z)\]- $x_k$ represents the input to the system and $y_k$ its output
Then, we have
\[Y(z) = H(z)X(z)\]- $H(z)$ is called the transfer function of the system
For our previous example
\[H(z) = \frac{Y(z)}{X(z)} = \frac{1}{z-a}\]- Initial conditions are ignored
Transfer function of a difference equation
- The difference equation is given by (initial conditions are zero)
- We can write it in form of a product
\(H(z) = \frac{b_{\text{M}} \prod_{i=1}^M (z^{-1} - \sigma_i^{-1})}{a_{\text{N}} \prod_{i=1}^N (z^{-1} - \lambda_i^{-1})} = \frac{b'_{\text{M}} \prod_{i=1}^M (z - \tilde{\sigma}_i)}{a'_{\text{N}} \prod_{i=1}^N (z - \tilde{\lambda}_i)}\) 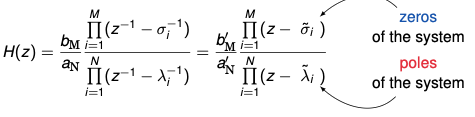
Observations
- Specification of z-transform requires both algebraic expression and ROC
- Rational z-transforms are obtained if the signal is a linear combination of exponentials
\(Y(z) = \frac{N(z)}{D(z)}\) - Rational z-transforms are completely characterized by their poles and zeros (except for gain)
Example
- Let’s consider an example transfer function:
\(H(z) = \frac{z}{(z + 0.6)(z - 0.9)}\) 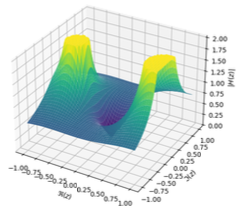
Learning outcomes
By the end of this lecture, you should be able to
- Explain the importance of z-transforms for analyzing discrete-time systems
- Derive and use the properties of z-transforms
- Represent discrete-time sequences in z-transform
- Analyze discrete-time systems
- Define the transfer function of a linear time-invariant (LTI) system
- Determine whether or not the transfer function is causal and stable