2025-09-22-Digital and Optimal Control-Discrete PID controllers
ELEC-E8101: Digital and Optimal Control-Discrete PID controllers
In the previous lecture. . .
We
- Discussed what happens to the signal when sampling
- Derived what is the sampling frequency so that one can reconstruct the signal
- Evaluated the options of discretization in control systems
- Used discretization methods for designing discrete-time systems
- Used direct methods of designing discrete-time systems
Feedback from last week
- Pace still too fast
→ Should definitely get better today
Learning outcomes
By the end of this lecture, you should be able to
- Design practical PID controllers for applications
- Design anti-windup schemes
PID-controllers
- Proportional-integral-derivative (PID) control is the standard for industrial control
- Over 90 % of industrial control systems use PID control
- The ubiquitous nature of PID control stems from
- Its simple structure
- The distinct effect of each of the three PID terms
- Its established use in industry
- Engineers’ preference to improve existing methods before adopting new ones
- The first theoretical analysis and practical application was in the field of automatic steering systems for ships – early 1920 onward
- Then, used for automatic process control in the manufacturing industry, where it was widely implemented in pneumatic and electronic controllers
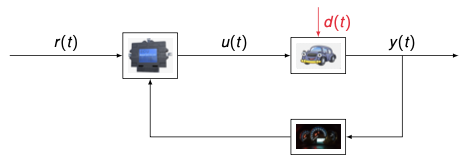
Feedback control in a discrete setting
Let us examine the following block diagram of a control system
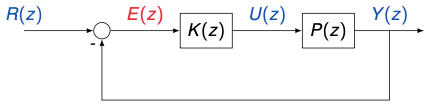
We have
\[\begin{aligned} Y(z) &= P(z) U(z) \\ U(z) &= K(z) E(z) \\ E(z) &= R(z) - Y(z) \end{aligned}\]Therefore,
\[Y(z) = P(z) K(z) E(z) = P(z) K(z) ( R(z) - Y(z) )\]Solving for $Y(z)$
Closed-loop transfer function from reference/input to output
The block diagram of the control system can be simplified as
- Similarly, for the error $E(z)$
- The problem becomes how to choose an appropriate $K(z)$ such that
- $H(z)$ will yield desired properties
- The resulting error function $e_k$ goes to zero as quickly and smoothly as possible
Behavior of continuous 2nd order systems with unit step input
- Consider the following block diagram with a standard 2nd order system

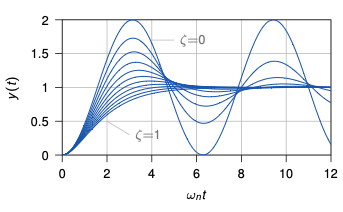
The behavior of the system is fully characterized by
- $\zeta$, the damping factor
- $\omega_n$, the natural frequency
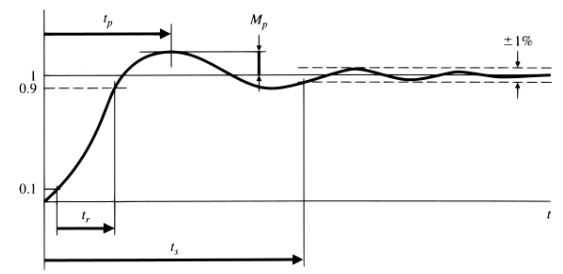
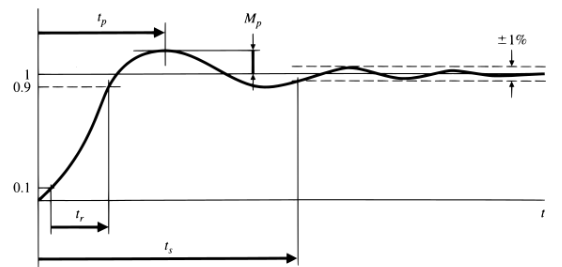
Time domain design specifications
- Typical specifications for the step response (continuous-time) domain
| Specification | Expression |
|---|---|
| Steady-state accuracy | $e_{ss}$ |
| Rise time (10 % – 90 %) | $t_r = \frac{1.8}{\omega_n}$ |
| Peak overshoot | $M_p \approx e^{-\frac{\pi \zeta}{\sqrt{1-\zeta^2}}}$ or $\zeta \geq 0.6 \left( 1 - \frac{M_p \text{ in \%}}{100} \right)$ |
| Settling time (1 %) | $t_s = \frac{4.6}{\zeta \omega_n}$ |
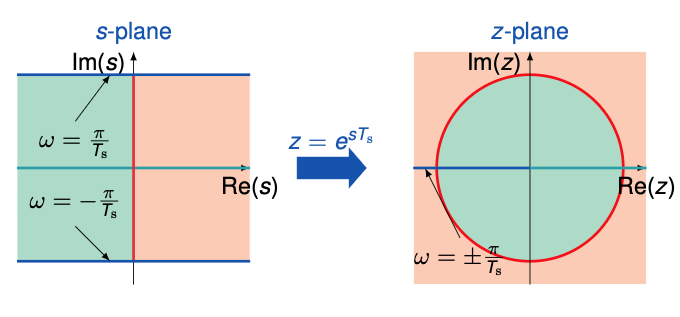
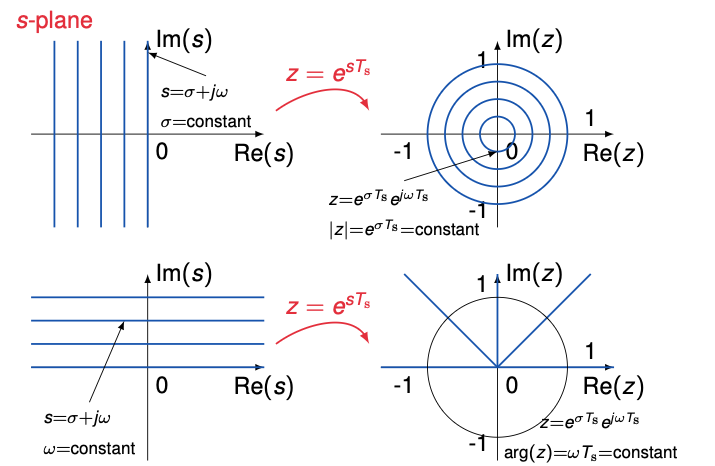
The mapping from the s-plane to the z-plane
- Locus of $s = \sigma + j \omega$ under the mapping $z = e^{sT_s}$
Pole locations for constant damping ratio $\zeta < 1$
\(s^2 + \zeta \omega_0 s + \omega_0^2 = 0\) \(\implies s = -\zeta \pm j \sqrt{1 - \zeta^2} \omega_0\) 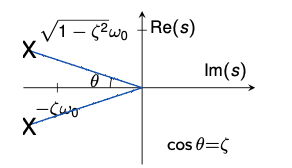
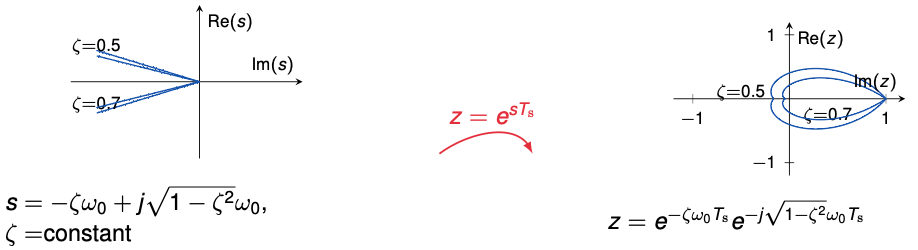
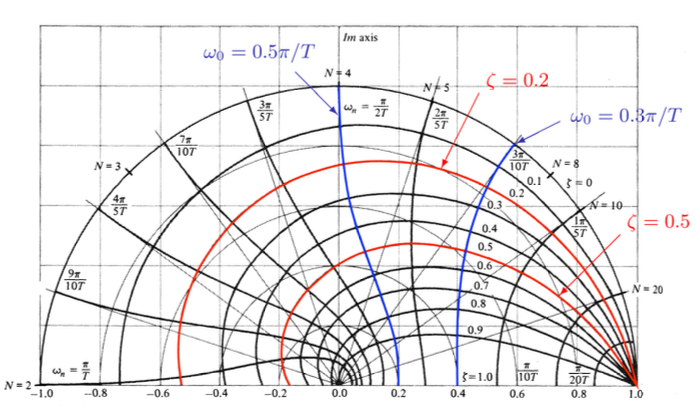
$z = \text{plane loci of roots of constant } \zeta \text{ and } \omega_n$
$s = -\zeta \omega_n \pm j \omega_n \sqrt{1-\zeta^2}$
$z = e^{Ts}$
$T = \text{sampling period}$
Time domain design specifications
- Typical specifications for the step response (discrete-time domain)
Steady-state accuracy
\(e_{ss} = \lim_{z \to 1}(z - 1) E(z)\)
Rise time (10% – 90%)
\(t_r = \frac{1.8}{\omega_n}\)
Peak overshoot
\(M_{\mathrm{p}}\approx e^{-\frac{\pi\zeta}{\sqrt{1-\zeta^{2}}}}\mathrm{or}\zeta\geq0.6\left(1-\frac{M_{\mathrm{p}}\mathrm{in}\%}{100}\right)\)
Settling time (1%)
radius of poles:
\(|z| < 0.01^{\frac{t_s}{t_s}}\)
Example – the car from the last lecture
- We take the transfer function obtained with the Tustin method and set $m = 1 \, t$, $T_s = 10 \, \mathrm{ms}$, and $\beta = 0.01 \, 1/s$:
- Assume the system is controlled by
- Find the steady-state error to a unit step $e_{ss}$
- Is the step response settling time $t_s < 1$?
Example – steady-state error

- We already showed that
\(E(z) = \frac{1}{1 + H(z)K(z)} R(z)\) - Where the input is
\(R(z) = \frac{z}{z - 1}\) - And the controller
\(K(z) = K_p = 10\) - How do we find the steady-state error?
- What happens for eₖ in the limit?
→ We can very precisely track the step input!
Example — settling time
- For the settling time, we said
\(|z| < 0.01^{\frac{T_s}{t_s}}\)
→ We first need to find the poles of the closed loop system!
\[H_\text{cl}(z) = \frac{H(z)K(z)}{1 + H(z)K(z)} = \frac{10 \frac{z+1}{200.01z - 199.99}}{1 + 10 \frac{z+1}{200.01z - 199.99}} = \frac{10(z+1)}{200.01z - 199.99 + 10(z+1)} = \frac{10(z+1)}{210.01z - 189.99}\]- Poles are the zeros of the denominator:
→ Then, we check the settling time:
\[0.9 < 0.01^{\frac{0.01}{1}} \implies 0.9 < 0.95 \quad \checkmark\]Continuous-time PID-controllers
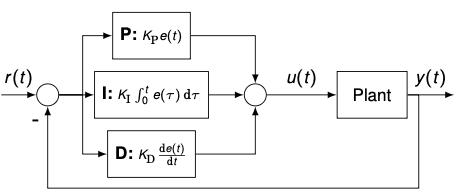
- P: amplifies the error by $K_P$
- I: eliminates the residual error by integrating over its historic cumulative value
- D: looks ahead by exerting control based on the rate of change
- The continuous-time PID-controller in the time domain is
- And in the Laplace domain:
\(U(s) = \left( K_P + \frac{K_I}{s} + K_D s \right) E(s)\) 
P-controller
- The “obvious” method – proportional control
Example: transfer function $G(s) = \frac{1}{s^2 + s + 1}$ with step input
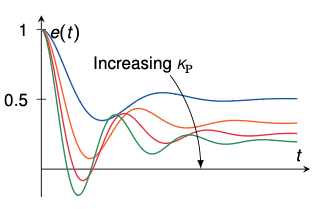
- Higher $K_P$ brings the error $e(t)$ closer to zero but never reaches it
- Also, the overshoot increases
I-controller
- An integral term increases the action depending on the value of the error and how long it has persisted
- If control action is too small and a steady-state offset remains, the action will increase
- A pure integral controller could bring the error to zero, however
- It would react slowly in the beginning
- Once the error is zero, the integral is still non-zero and causes overshoot and oscillations
- Alternative: PI-control, often used for example in motor control
D-controller
- React to changes in the error
→ If error starts to shrink, can decrease control action, otherwise increase - Aims at flattening error trajectory
- Ideal derivative control cannot (and must not) be realized in a PID-controller
- Practical systems always contain high frequency disturbances, which are amplified by derivative control
- Because of that, a low-pass filter/lag term is usually added
\(K_D s \rightarrow \frac{K_D s}{1 + \frac{K_D s}{N}}\) 
- Other practical modification: take derivative only of the output, not the reference and error signal
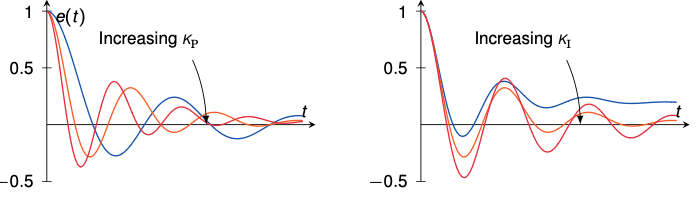
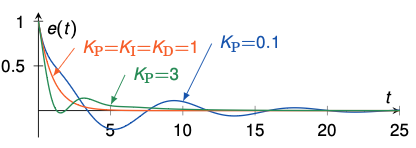
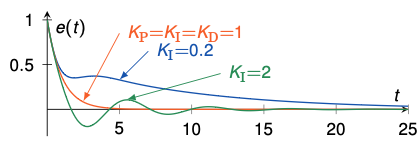
PID-controller
effect of $K_P$ ($K_I$ and $K_D$ kept constant)
effect of $K_I$ ($K_P$ and $K_D$ kept constant)
effect of $K_D$ ($K_P$ and $K_I$ kept constant)
From continuous- to discrete-time PID-controllers
- Simple discretization
- Therefore
- Taking the z-transform:
- Note: there are other interpretations of discrete-time PID-controllers
- For example, if backward integration is used in the integral part:
- The discretization of a practical PID-controller is as straightforward
Tuning PID-controllers
- The structure of the used discrete PID algorithm must always be told together with the tuning parameters $K_P$, $K_I$, $K_D$ (and $T_s$)
- Controller design is typically based on heuristic design methods for selecting the controller parameters
- The principal design goal is stability: the system is stable when the closed-loop poles are on the left half of the $s$-plane or inside the unit circle in the $z$-plane
- Secondary criteria are, for example, rise time, overshoot, settling time, and steady-state error
- These can be analyzed graphically from impulse, step, and ramp responses of the closed-loop system
Table: Effect of increasing a parameter independently
| Parameter | Rise time | Overshoot | Settling time | Steady-state error | Stability |
|---|---|---|---|---|---|
| $K_P$ | Decrease | Increase | Small change | Decrease | Degrade |
| $K_I$ | Decrease | Increase | Increase | Eliminate | Degrade |
| $K_D$ | Minor change | Decrease | Decrease | No effect in theory | Improve if small |
Empirical tuning rules
- Start with $K_P = K_I = K_D = 0$
- Increase $K_P$ until you reach the reference value fast with some overshoot and oscillations
- Increase $K_D$ until the oscillations decrease to a satisfactory level
- Increase $K_I$ so that steady-state error will be eliminated
Tuning rules for PID controllers
J. G. Ziegler and N. B. Nichols. “Optimum settings for automatic controllers”. In: Transactions of the American Society of Mechanical Engineers 64.8 (1942), pp. 759–765
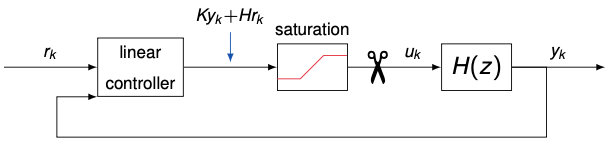
Actuator saturation
- Most control systems are designed based on linear theory
- A linear controller is simple to implement and performance is good, as long as dynamics remain close to linear
- In practice, we always have nonlinear effects, e.g., actuator saturation, that we need to take care of
- Saturation, if ignored in the design phase, can lead to closed-loop instability, especially if the open-loop process is unstable
- Main reason: the control loop gets broken if saturation is not taken into account by the controller
Saturation function
- Saturation can be defined as the static nonlinearity
- $u_{\min}$ and $u_{\max}$ are the minimum and maximum allowed actuation signals
- Example: for a typical DC motor, we have $u_{\min} = -12\,\text{V}, \, u_{\max} = 12\,\text{V}$
- If $u$ is a vector of $m$ components, the saturation function is defined as the saturation of all its components
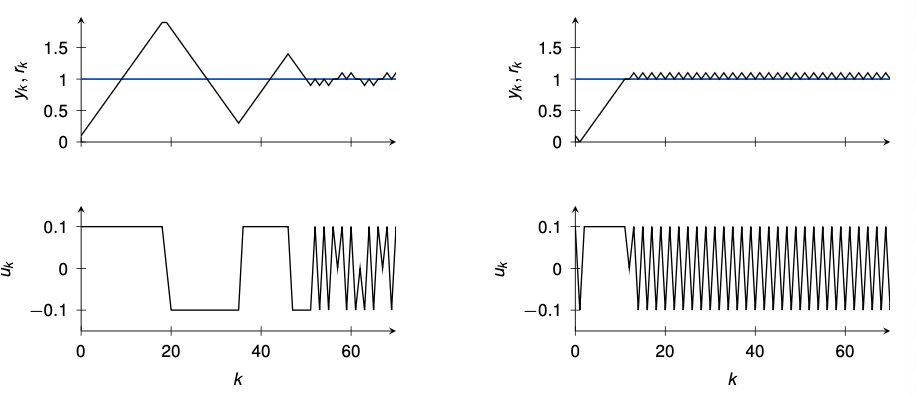
The wind-up problem
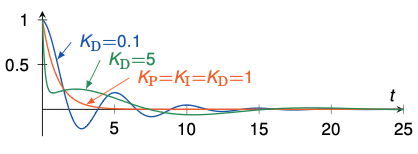
Consider a simple process with saturation (±0.1) and PID gains $K_P = K_I = K_D = 1$
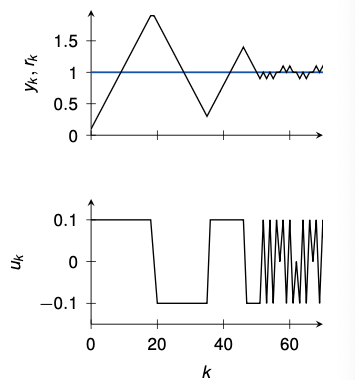
- Slow convergence to steady-state
- The reason is the “wind-up” of the integrator contained in the PID-controller
- The integrator keeps integrating the tracking error even when the input is saturated
- Anti wind-up schemes avoid this effect
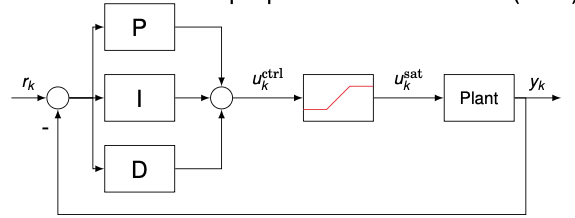
Anti-windup #1: incremental algorithm
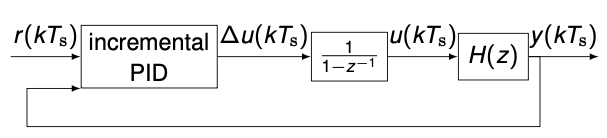
- It only applies to PID control laws implemented in incremental form
where
\[\Delta u(kT_s) = u(kT_s) - u((k-1)T_s)\]- Stop integration if adding a new $\Delta u(kT_s)$ causes a violation of the saturation bound
Anti-windup #2: back-calculation
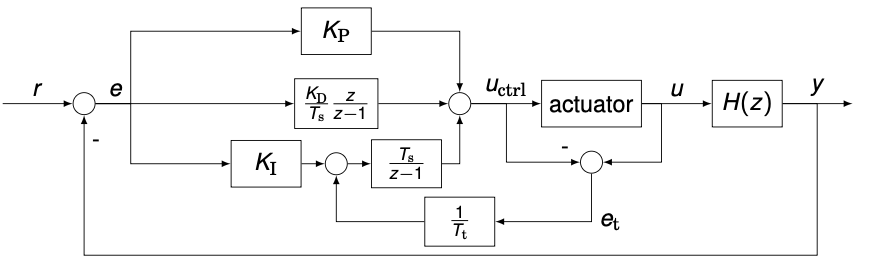
- Anti wind-up scheme has no effect when the actuator is not saturating ( $e_t = 0$ )
- Time constant $T_t$ determines how quickly the integrator of the PID-controller is reset
- If the actual input $u$ of the actuator is not measurable, we can use a mathematical model of it, e.g., $e_t = u_{ctrl} - \text{sat}(u)$
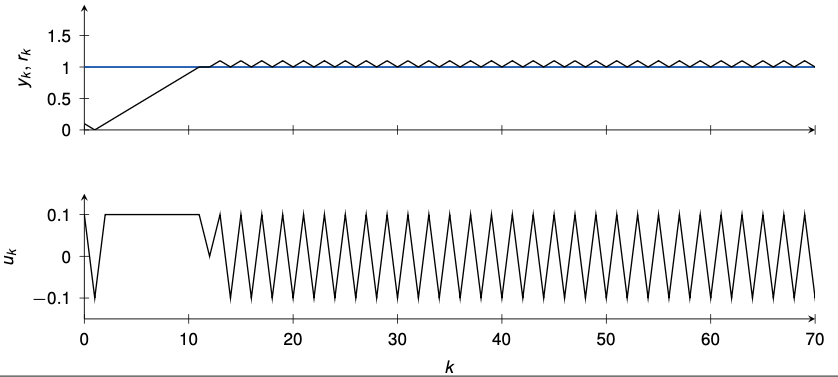
Anti-windup #2: example
- Let’s consider again the PID-controller from before ($K_P = K_I = K_D = 1$) and add back-calculation with $T_t = 1$
- Windup is avoided due to back-calculation
- Note: only one tuning parameter ($T_t$), but only applicable to PID-controllers
Benefits of the anti-windup scheme
- In case of windup we have
- Large output oscillations
- Longer time to reach steady-state
- Peaks of control signal
Hardware demo
Practical demonstration of PID-control: https://youtu.be/fusr9eTceEo
Learning outcomes
By the end of this lecture, you should be able to
- Design practical PID controllers for applications
- Design anti-windup schemes