2025-09-15-Digital and Optimal Control Discretization
Digital and Optimal Control: Discretization
In the previous lecture. . .
We
- Discussed the importance of z-transforms for analyzing discrete-time systems
- Derived and used the properties of z-transforms
- Represented discrete-time sequences in z-transform
- Analyzed discrete-time systems
- Defined the transfer function of a linear time-invariant (LTI) system
- Determined whether or not the transfer function is causal and stable
Feedback and questions from last week
- Pace could be slower
→ I will work on this - Missing real-life application
→ This will follow today - “Put a clear legend of each term of the equations”
→ I’m not entirely sure what is meant by a “legend,” but if I get an explanation for that I can try to do this
Where we left last time…
- Let’s consider an example transfer function:
\(H(z) = \frac{z}{(z + 0.6)(z - 0.9)}\) 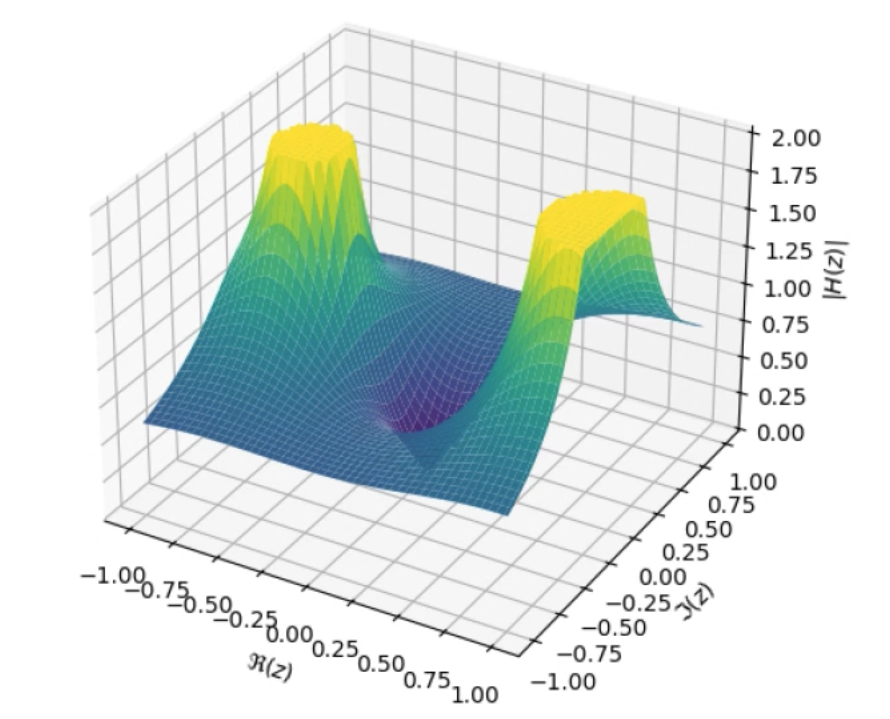
Causal systems
Causal systems We call a system causal if its output $y_{k’}$ only depends on the input $u_k$ for $k \leq k’$.
- Causality in this sense means the future cannot influence the past
- Assume we investigate a system for which $x_k = 0$, for all $k < 0$
- If $h_k$ is causal, then $h_k = 0$, for all $k < 0$, and
\(H(z) = \mathcal{Z}(h_k) = \mathcal{Z}(h_k u_k) = \mathcal{Z}_+(h_k) = H_+(z)\) \(X(z) = \mathcal{Z}(x_k) = \mathcal{Z}(x_k u_k) = \mathcal{Z}_+(x_k) = \mathbf{X_+}(z)\) \(Y(z) = Y_+(z) = \mathcal{Z}(h_k u_k * x_k u_k) = H_+(z) X_+(z)\)
- Details on how this can be derived follow on the next slide. Important conclusion
Conclusion If the transfer function is causal and $x_k = 0, \forall k < 0$, then $\mathcal{Z}_+(\cdot)$ is enough for the analysis of the system.
\(y_k = h_k * x_k = h_k u_k * x_k u_k\) \(= \sum_{n=-\infty}^{\infty} h_n u_n x_{k-n} u_{k-n}\) \(= \sum_{n=0}^{\infty} h_n x_{k-n} u_{k-n}\) \(\Longrightarrow y_k = \sum_{n=0}^k h_n x_{k-n} \Longrightarrow y_k = 0, \forall k < 0\) \(\Longrightarrow Y(z) = Y_+(z) = \mathcal{Z}(h_n u_n * x_n u_n) = H_+(z) X_+(z)\)
- Suppose the transfer function is causal, i.e., $h_k = 0, \forall k < 0$
\(H(z) = \sum_{k=0}^{\infty} h_k z^{-k} \implies \text{ROC}_h \text{ includes } z = \infty\) 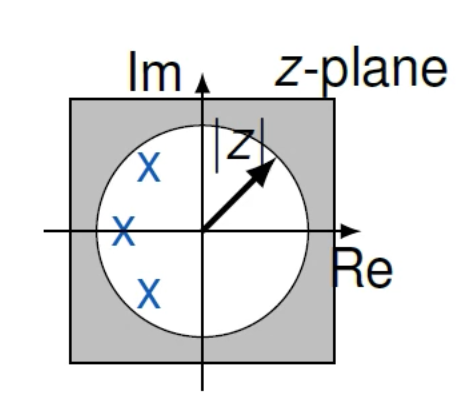
- Suppose
- Then, the $\text{ROC}_h$ is right-sided and its radius is higher than the maximum pole
Conclusion 1 A discrete-time system $h$ is causal if, and only if, the $\text{ROC}_h$ is the external area of a circle and includes infinity.
Relation between causality and stability
Suppose the system is stable. Then, $|h|1 := \sum{k=0}^{\infty} h_k < \infty$ Consequently, $H(e^{j\omega}) = \mathcal{F}(h_k)$ exists. Therefore, $\text{ROC}_h$ should include $ z =1$
Conclusion 2
A discrete-time system $h$ is bounded-input bounded-output (BIBO) stable if, and only if, $\text{ROC}_h$ includes $z = 1$.
- Combine Conclusions 1 and 2
Theorem
A causal linear time-invariant (LTI) system $h$ with rational $H(z)$ is stable if, and only if, all the poles $\lambda_i$ of $H(z)$ satisfy
\(|\lambda_i| < 1.\)
z-transform: valuable tool
Efficient calculation for the response of an LTI system: The convolution in the discrete-time domain is computed as a product in the z-domain:
\(y_k = x_k * h_k \implies Y(z) = X(z)H(z)\)Description of LTI systems with regard to their behavior in the frequency domain:
low pass filter, band pass filter, etc.Stability analysis of an LTI system:
(via calculation of the region of convergence)- A causal continuous-time system is stable if its poles are in the left s-half-plane
- A causal discrete-time system is stable if its poles are located inside the unit circle
Back to the inventory management example
- How can we use the z-transform to analyze the inventory level?
- The dynamics of the process are
- Let’s analyze for which $K_p$ in the control law below the system is stable, i.e., $I_k - I_{\text{target}}$ goes to zero for $k \to \infty$!
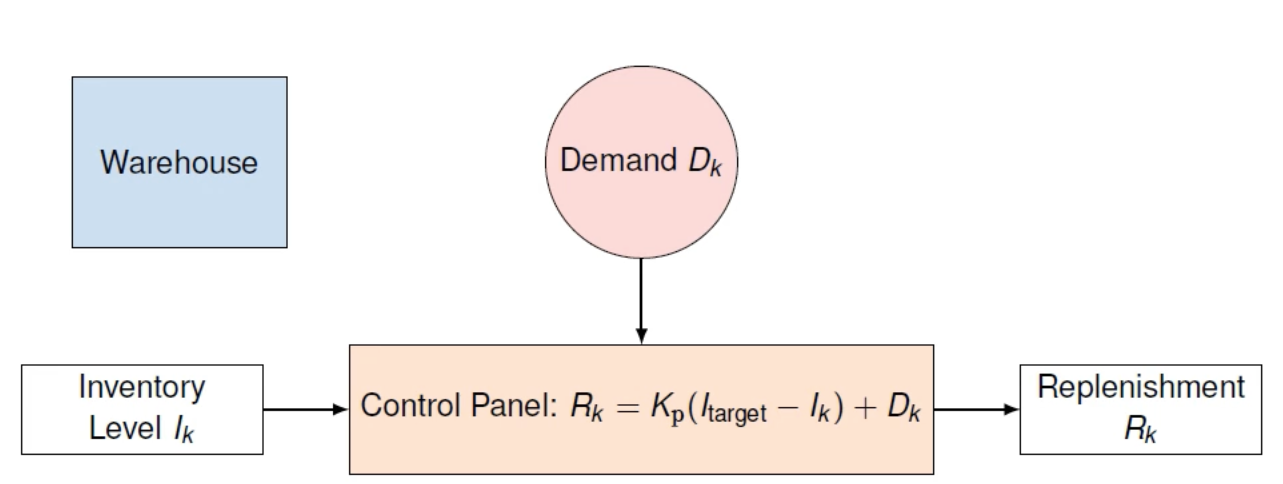
Digital inventory management system
We have
\(I_{k+1} = I_k - D_k + R_k\) \(R_k = K_p (I_{\text{target}} - I_k) + D_k\)Let’s write this into one equation
\(I_{k+1} = I_k - D_k + K_p (I_{\text{target}} - I_k) + D_k\) \(= I_k + K_p (I_{\text{target}} - I_k)\)We can now use the z-transform
\(z I(z) = I(z) + K_p (I_{\text{target}} - I(z))\)Now we can compute the transfer function
\(I(z)(z - 1 + K_p) = K_p I_{\text{target}}\) \(\frac{I(z)}{I_{\text{target}}} = \frac{K_p}{z - 1 + K_p}\)
→ The system is stable if $0 < K_p < 2$
Learning outcomes
By the end of this lecture, you should be able to:
- Explain what happens to the signal when sampling
- Derive what is the sampling frequency so that one can reconstruct the signal
- Evaluate different options for discretizing a control system
- Use discretization methods for designing discrete-time systems
- Use direct methods of designing discrete-time systems
Sampling: the bridge from continuous to discrete
- The world surrounding us is analog!
- Signal analysis and control is done via digital computers (see first lecture)
- Thus, analog signals and systems have to be transformed to discrete and vice-versa
- This is done via sampling
- The measured entities are called samples
- The sampling typically takes place in regular intervals, e.g., every $T_s$:
sssss ……
\[x_p(t) = x_c(t)p(t) = \sum_{n=-\infty}^{\infty} x_c(t)\delta(t - nT_s) = \sum_{n=-\infty}^{\infty} x_c(nT_s)\delta(t - nT_s)\]where
\[\delta(t - nT_s) = \begin{cases} 1, & \text{if } t = nT_s \\ 0, & \text{otherwise} \end{cases}\]Frequency range
- Suppose that the Fourier transform of $x_p(t)$ exists, i.e., \(\mathcal{F}\{x_p(t)\} = X_p(j\omega)\)
- Then, \(X_p(j\omega) = \mathcal{F}\{x_p(t)\} = \mathcal{F}\{x_c(t)p(t)\} = \frac{1}{2\pi} X_c(j\omega) * P(j\omega)\)
Since $p(t)$ is periodic \(p(t) = \sum_{k=-\infty}^\infty a_k e^{j k \omega_s t} \qquad \text{Fourier series}\)
\[a_n = \frac{1}{T_s} \int_{-\frac{T_s}{2}}^{\frac{T_s}{2}} p(t) e^{-j n \omega_s t} dt = \frac{1}{T_s} \int_{-\frac{T_s}{2}}^{\frac{T_s}{2}} \delta(t) e^{-j n \omega_s t} dt = \frac{1}{T_s}, \ \forall n\] \[\implies p(t) = \frac{1}{T_s} \sum_{k=-\infty}^\infty e^{j k \omega_s t}\]Moreover, \(\mathcal{F}\{ e^{j k \omega_s t} \} = 2\pi \delta(\omega - k \omega_s) \implies P(j \omega) = \frac{2\pi}{T_s} \sum_{n=-\infty}^\infty \delta(\omega - n \omega_s), \quad \omega_s = \frac{2\pi}{T_s}\)
- As a result:
- As a result:
sss
ssss
Sampling criterion/theorem
Suppose $x_c(t)$ is a low-pass signal with $X_c(j\omega) = 0, \forall \omega > \omega_0$, e.g., Then, $x_c(t)$ can be uniquely determined by its samples $x_c(nT_s), n=0, \pm 1, \pm 2, \ldots$, if the sampling angular frequency is at least twice as big as $\omega_0$, i.e.,
\[\omega_s = \frac{2\pi}{T_s} > 2 \omega_0\]- The minimum sampling angular frequency for which the inequality holds is called the Nyquist angular frequency.
Remarks
Reconstructing such a signal requires a low-pass filter with cut-off frequency:
\(\omega_0 < \omega_c < \omega_s - \omega_0\)- From the natural meaning of frequency, we understand that the fast changes of a signal in time domain correspond to the existence of high frequencies with energy
The bigger the bandwidth of a signal, the faster the changes in time domain
- Signals with a limited bandwidth are called band-limited
- If a signal is not band-limited, then its perfect reconstruction is impossible
- We should choose the sampling frequency $\omega_s$ to be
- high enough, so that information loss is small
- small enough, so that the system does not run out of memory
- Engineering rule of thumb: we often choose the sampling frequency such that $\omega_s \approx 10\omega_0$
- The reconstruction of a signal might be adequate if $X(j\omega)$ reduces to zero fast for $\omega \to \infty$, which is the case in most practical systems
Sampling with zero-order hold (ZOH)
- Sampling narrow and large-amplitude pulses which approximate impulses are in practice difficult to generate and transmit
- Therefore, it is often more convenient to generate the sampled signal in a form referred to as zero-order hold (ZOH)
- Such a system samples $x_c(t)$ at a given instant and holds that value until the next instant
Discretization
There are 2 main design approaches
(a) Discretize the analog controller(b) Discretize the process and do the design completely in discrete time
Discretization methods
- We will see how we can transform the transfer function $G(s)$ of an analog system in the $s$-domain to an equivalent transfer function $H(z)$ of a discrete system in the $z$-domain
- $G(s)$ can be transformed to $H(z)$ by 3 different approaches:
- Rely on the use of numerical methods for solving differential equations describing the given system and for converting them to difference equations
- Match the response of continuous-time systems to specific inputs (e.g., impulse, step, and ramp functions) to those of discrete-time systems for the same inputs
- Match the poles and zeros of $G(s)$ in the $s$-domain with the corresponding poles and zeros of $H(z)$ in the $z$-domain
| s-domain | z-domain | |
|---|---|---|
| pole | $s = s_0$ | $z = e^{s_0 T_s}$ |
Backward difference method
Calculate the derivative by using the difference between the current and the previous sample divided by the sampling period, i.e.,
\(\frac{\mathrm{d}}{\mathrm{d}t}y(t)\big|_{t=kT_s} \approx \frac{y(kT_s)-y([k-1]T_s)}{T_s} = \frac{y_k - y_{k-1}}{T_s}\)- The Laplace-transform of the derivative is $\mathcal{L}(\dot{y}(t))=sY(s)$
- The $z$-transform of its approximation is
\(\mathcal{Z}\left(\frac{\mathrm{d}}{\mathrm{d}t} y(t)\big|_{t=kT_s}\right) = \mathcal{Z}\left(\frac{y_k - y_{k-1}}{T_s}\right) = \frac{1-z^{-1}}{T_s}Y(z)\)
→ Systems that are stable in continuous time remain stable
→ Not all properties can be reconstructed
Forward difference method
Calculate the derivative by using the difference between the next and the current sample divided by the sampling period, i.e.,
\(\frac{\mathrm{d}}{\mathrm{d}t} y(t) \bigg|_{t=kT_s} \approx \frac{y\big((k+1)T_s\big) - y(kT_s)}{T_s} = \frac{y_{k+1} - y_k}{T_s}\)- The Laplace-transform of the derivative is $\mathcal{L}\big(\dot{y}(t)\big) = sY(s)$
- The $z$-transform of its approximation is
\(\mathcal{Z} \left( \frac{\mathrm{d}}{\mathrm{d}t} y(t) \bigg|_{t=kT_s} \right) = \mathcal{Z} \left( \frac{y_{k+1} - y_k}{T_s} \right) = \frac{z - 1}{T_s} Y(z)\)
$\rightarrow$ Systems that are stable in continuous time may become unstable
Approximation of differential equations by difference equations
- Calculate the derivative by using the difference between the current and the previous sample divided by the sampling period, i.e.,
- The second derivative is therefore
- In general…
Overview of different discretization methods
- Numerical methods for converting differential to difference equations
- Backward difference method
- ✓ Stability properties are preserved
- ✗ Stable systems are mapped to a subset of the unit circle, cannot cover all system specifications
- Forward difference method
- ✓ Covers larger spectrum
- ✗ Stability properties not preserved
- Backward difference method
Discretization methods
- We will see how we can transform the transfer function $G(s)$ of an analog system in the $s$-domain to an equivalent transfer function $H(z)$ of a discrete system in the $z$-domain
- $G(s)$ can be transformed to $H(z)$ by 3 different approaches:
- Rely on the use of numerical methods for solving differential equations describing the given system and for converting them to difference equations
- Match the response of continuous-time systems to specific inputs (e.g., impulse, step, and ramp functions) to those of discrete-time systems for the same inputs
- Match the poles and zeros of $G(s)$ in the $s$-domain with the corresponding poles and zeros of $H(z)$ in the $z$-domain
| s-domain | z-domain | |
|---|---|---|
| pole | $s = s_0$ | $z = e^{s_0 T_s}$ |
Impulse-invariance method(important slide)
The impulse response is given by
\(g(t) = \mathcal{L}^{-1}(G(s))\)From $g(t)$, via discretization, we get $g(kT_s)$, where $T_s$ is the sampling period
\(h_k = g(kT_s)\)From $h(kT_s)$, using the z-transform, we derive $H(z)$ in the z-domain, i.e.,
\(H(z) = \mathcal{Z}(\mathcal{L}^{-1}(G(s))|_{t=kT_s})\)Using this method, both frequency and step responses are not preserved
Impulse-invariance method: example
- Let us consider a first-order time-delay element with Laplace domain transfer function
- Could, for example, be a simple model of a drone that should change its steering angle
- To make our life easier, let’s assume $K = T_s = 1$
- Then, we find from the Laplace transform table
- And from the z-transform table
Impulse-invariance method: LTI systems
- The impulse response of an LTI system can be written as
- Each element’s time response contains every mode of the system (although some coefficients may be negligible)
- After sampling: $h_k = d_1 e^{\lambda_1 kh} + d_2 e^{\lambda_2 kh} + \ldots + d_n e^{\lambda_n kh}$
- Taking z-transforms
Impulse-invariance method: LTI systems
System $H(z)$ has $n$ poles:
\[p_i = e^{\lambda_i h} = e^{(\sigma_i + j\omega_i)h} = e^{\sigma_i h} e^{j \omega_i h} \implies |p_i| = e^{\sigma_i h} \left| e^{j \omega_i h} \right| = e^{\sigma_i h} < 1\]Hence, the z-transform always projects a stable pole in the $s$-domain to a stable pole in the $z$-domain
$\rightarrow$ The discrete time system will be stable if the original analog system is stable
Step-invariance method
The step response is given by
\(g^{\text{step}}(t) = \mathcal{L}^{-1} \left( \frac{G(s)}{s} \right)\)The corresponding step response in discrete time is given by
\(h_k^{\text{step}} = g^{\text{step}}(k T_s)\)The z-transform of $h_k^{\text{step}}$ is given by
\(\mathcal{Z}(h_k^{\text{step}}) = \frac{z}{z - 1} H(z)\)The final transformation is thus given by
\(H(z) = \frac{z-1}{z} \mathcal{Z} \left( \mathcal{L}^{-1} \left( \frac{G(s)}{s} \right) \bigg|_{t = n T_s} \right)\)Neither the frequency nor the impulse responses are preserved
Recap: overview of different discretization methods
- Numerical methods for converting differential to difference equations
- Backward difference method
✓ Stability properties are preserved
✗ Stable systems are mapped to a subset of the unit circle, cannot cover all system specifications - Forward difference method
✓ Covers larger spectrum
✗ Stability properties not preserved
- Backward difference method
- Match response to specific inputs
- Impulse-invariance method
✓ Impulse response and stability properties preserved
✗ Step response, frequency response not preserved - Step-invariance method
✓ Step response and stability properties preserved
✗ Impulse response, frequency response not preserved
- Impulse-invariance method
Discretization methods
- We will see how we can transform the transfer function $G(s)$ of an analog system in the $s$-domain to an equivalent transfer function $H(z)$ of a discrete system in the $z$-domain
- $G(s)$ can be transformed to $H(z)$ by 3 different approaches:
- Rely on the use of numerical methods for solving differential equations describing the given system and for converting them to difference equations
- Match the response of continuous-time systems to specific inputs (e.g., impulse, step, and ramp functions) to those of discrete-time systems for the same inputs
- Match the poles and zeros of $G(s)$ in the $s$-domain with the corresponding poles and zeros of $H(z)$ in the $z$-domain
| s-domain | z-domain | |
|---|---|---|
| pole | $s = s_0$ | $z = e^{s_0 T_s}$ |
Bilinear or Tustin method
- Using this method, the conversion of $G(s)$ in the z-domain is
- Represents one of the most popular methods because the stability of the analog system is preserved
- Homework: Prove that this transformation has a unique mapping between the $s$-domain and the $z$-domain, and it is as shown below
Bilinear or Tustin method: frequency response
- What is the relationship between $G(j \Omega)$ and $H(e^{j \omega})$?
Recall that $G(j \Omega) = G(s) \big _{s=j \Omega}$ and $H(e^{j \omega}) = H(z) \big _{z=e^{j \omega}}$ - Substituting these into the bilinear transform, we get
This nonlinear relationship is called “frequency warping”
- The good news is that we don’t need to worry about aliasing
- The “bad” news is that we have to account for frequency warping when we start from a discrete-time filter specification
Recap: overview of different discretization methods
- Numerical methods for converting differential to difference equations
- Backward difference method
✓ Stability properties are preserved
✗ Stable systems are mapped to a subset of the unit circle, cannot cover all system specifications - Forward difference method
✓ Covers larger spectrum
✗ Stability properties not preserved
- Backward difference method
- Match response to specific inputs
- Impulse-invariance method
✓ Impulse response and stability properties preserved
✗ Step response, frequency response not preserved - Step-invariance method
✓ Step response and stability properties preserved
✗ Impulse response, frequency response not preserved
- Impulse-invariance method
- Match poles of continuous-time and discrete-time system
- Tustin method
✓ Stability properties preserved, stable systems are mapped into unit circle
✗ Frequency response not preserved (frequency warping)
- Tustin method
Remark: direct design based on specifications
A rational z-transform can be written as
\(H(z) = c \frac{(z-\mu_1)(z-\mu_2) \cdots (z-\mu_M)}{(z-p_1)(z-p_2) \cdots (z-p_N)}\)- To compute the frequency response of $H(e^{j\omega})$, we compute $H(z)$ at $z = e^{j\omega}$
- But $z = e^{j\omega}$ represents a point on the circle’s perimeter
Let $A_i = \left e^{j\omega} - p_i \right $ and $B_i = \left e^{j\omega} - \mu_i \right $
Example
In-class exercise: control the speed of a car
- We want to control the speed of a car with a digital controller
- We know:
- Newton’s law (friction-less): $F(t) = ma(t)$ where $F$ is the force, $m$ the mass, and $a$ the acceleration
- The acceleration is the time derivative of the velocity: $a(t) = \frac{d v(t)}{dt}$
- We have velocity-dependent friction with coefficient $\beta$
- We can write the differential equation describing the velocity as
We can write the differential equation describing the velocity as
\(\frac{dv(t)}{dt} = \frac{F(t)}{m} - \beta v(t)\)Derive the z-domain transfer function using (ignore initial conditions)
(a) The backward difference method
(b) The Tustin method
In-class exercise – solution: discretization with backward differences
\[\frac{\mathrm{d} v(t)}{\mathrm{d} t} = \frac{F(t)}{m} - \beta v(t)\]- For the backward difference method, we know that
- For our equation, that means
In-class exercise – solution: discretization with Tustin method
\[\frac{\mathrm{d}v(t)}{\mathrm{d}t} = \frac{F(t)}{m} - \beta v(t)\]- For the Tustin method, we said
→ We first need the Laplace transform
\[sV(s) = \frac{F(s)}{m} - \beta V(s)\] \[\frac{V(s)}{F(s)} = \frac{1}{m(s + \beta)}\]- Now we can insert the Tustin transformation
In-class exercise – solution: comparison
- From the backward difference method, we find
- Using the Tustin method, we find
→ Different methods yield different transfer functions!
Learning outcomes
By the end of this lecture, you should be able to
- Explain what happens to the signal when sampling
- Derive what is the sampling frequency so that one can reconstruct the signal
- Evaluate different options for discretizing a control system
- Use discretization methods for designing discrete-time systems
- Use direct methods of designing discrete-time systems