Performance Modelling, Vectorisation 01 Overview
1 piece of coursework covering both components due in term 3.
Performance Modelling, Vectorisation Overview
Fundamental question
I would like this code to run faster: how do I know what to do?
Performance models & measurements
We can treat the computer as an experimental system:
1. Measure performance
2. Construct models that explain performance
3. Apply appropriate optimisations
What you will need
Hamilton account (which you should already have)
familiarity with basic shell commands
likwid tools, already available on Hamilton
Stored-program architecture
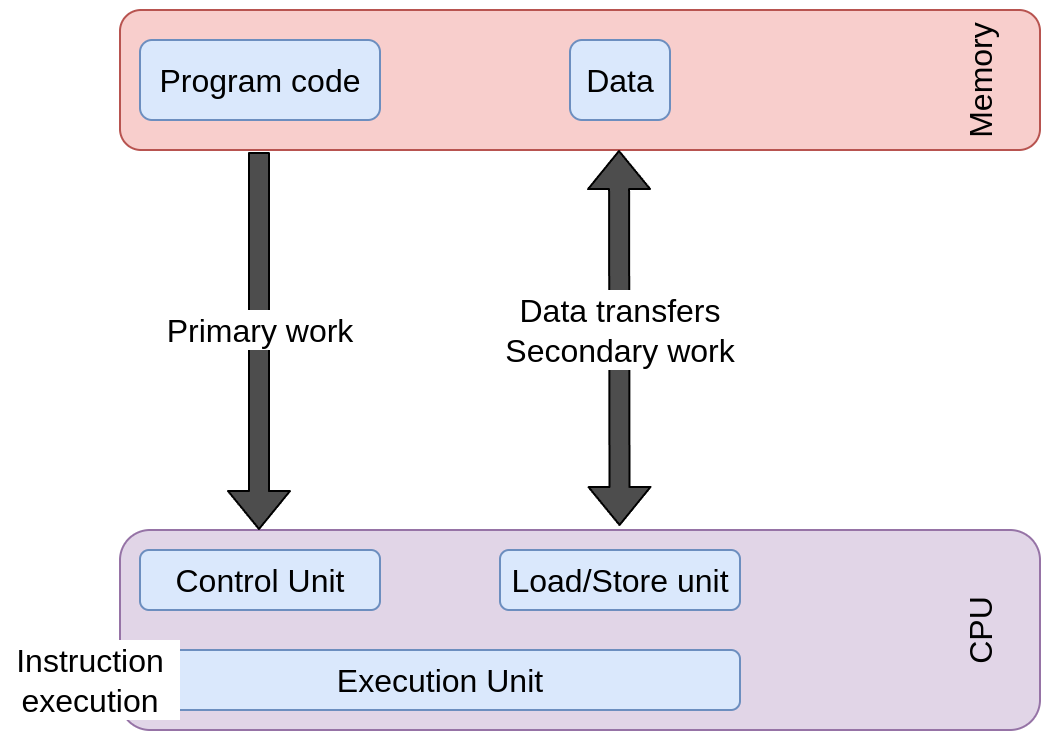
Resource bottlenecks: instruction execution
▶ Primary resource of the processor.
▶ Measure is instruction throughput (instructions/second).
▶ First HW design goal is to increase instruction throughput.
Performance depends on how fast the CPU retires instructions.
Retired instruction
▶ CPUs execute more instructions than needed by program flow.
▶ “Retired instruction” are those whose results are stored**. 指代被存贮了的指令
Example: adding two arrays
for (int i = 0; i < N; i++)
a[i] = a[i] + b[i];
- User view
Work is N flops (additions)
- Processor view
Work is 6N instructions
1
2
3
4
5
6
7
.top
LOAD r1 = a[i]
LOAD r2 = b[i]
ADD r1 = r1 + r2
STORE a[i] = r1
INCREMENT i
GOTO .top IF i < N
Mismatch
- Processor designers: all instructions are “work”.
- Code developers: instructions I write are “work”.
Hardware for programmers
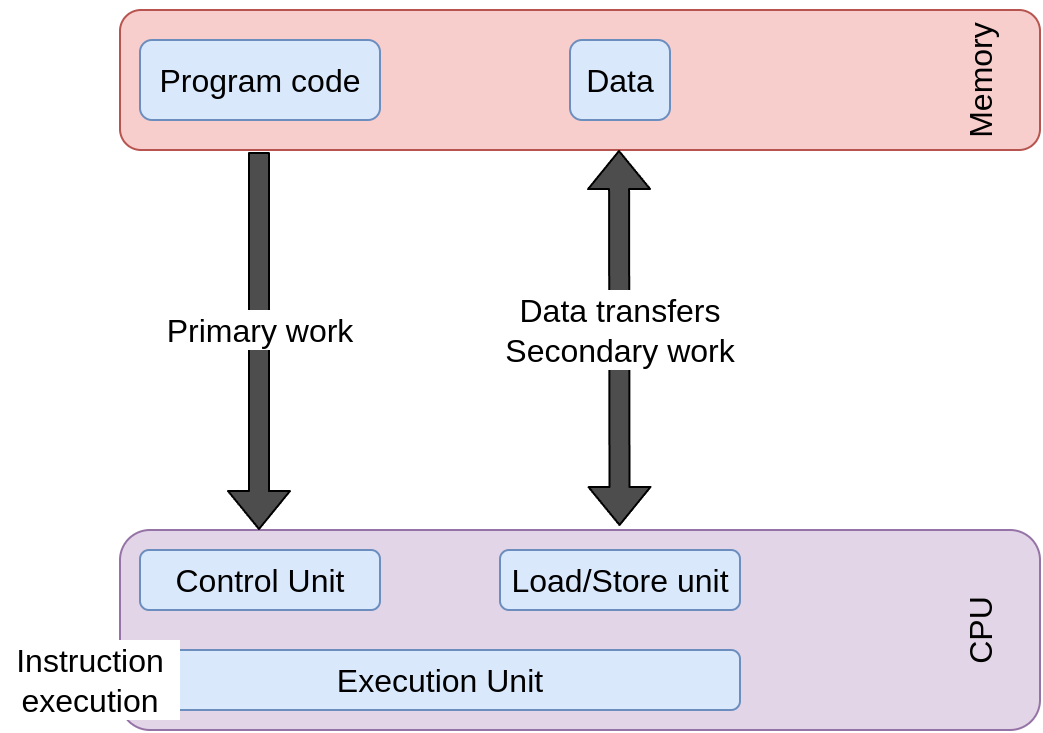
Resource bottlenecks: data transfer
▶ From memory to CPU and back.
▶ Consequence of instruction execution.
▶ Secondary resource.
▶ Measure is bandwidth (bytes/second).
▶ Bandwidth determined by load/store rate and HW limits
Example: adding two arrays
1
2
for (int i = 0; i < N; i++)
a[i] = a[i] + b[i];
Data transfers (double precision floats):
1
2
3
LOAD r1 = a[i] /* 8 bytes */
LOAD r2 = b[i] /* 8 bytes */
STORE a[i] = r1 /* 8 bytes */
24 bytes of data movement per loop iteration.
Understanding the performance of some code
Core question
What is the resource bottleneck?
- Instruction execution?
- Data transfer?
Core question
What is the resource bottleneck?
- Instruction execution?
- Data transfer?
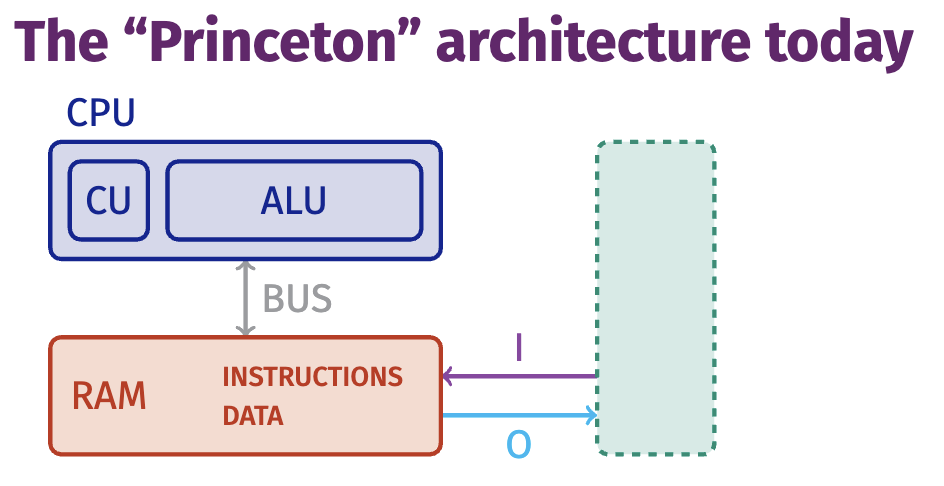
The “Princeton” architecture
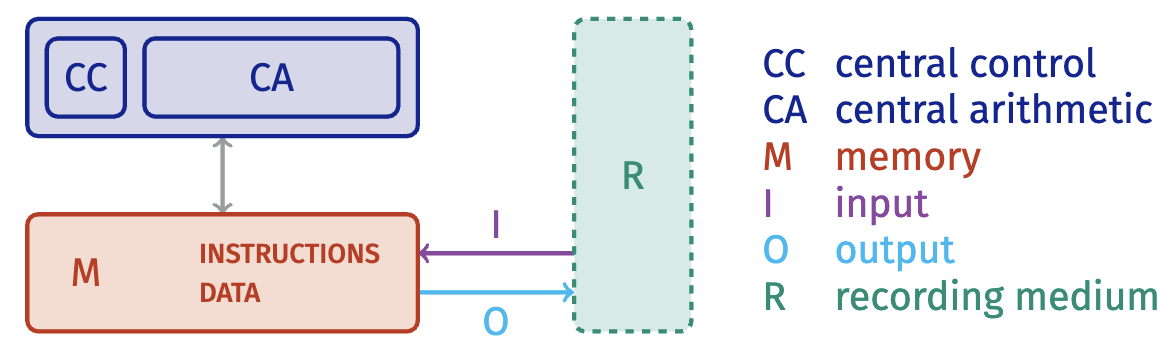
The “Princeton architecture”
- Used by programming languages
- Sequential model
- In-order execution
- Simple
- Realistic for 1945
What has changed in the last 77 years?
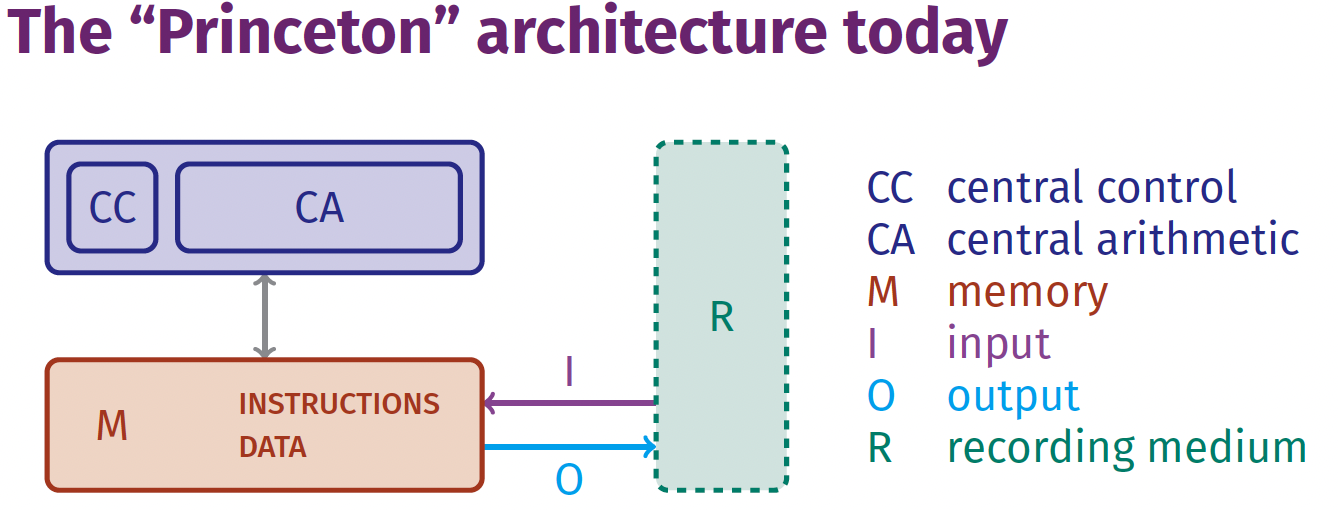 THE ONE FEATURE: both instructions and data reside in memory. But CPUs are much more complicated today!
THE ONE FEATURE: both instructions and data reside in memory. But CPUs are much more complicated today!
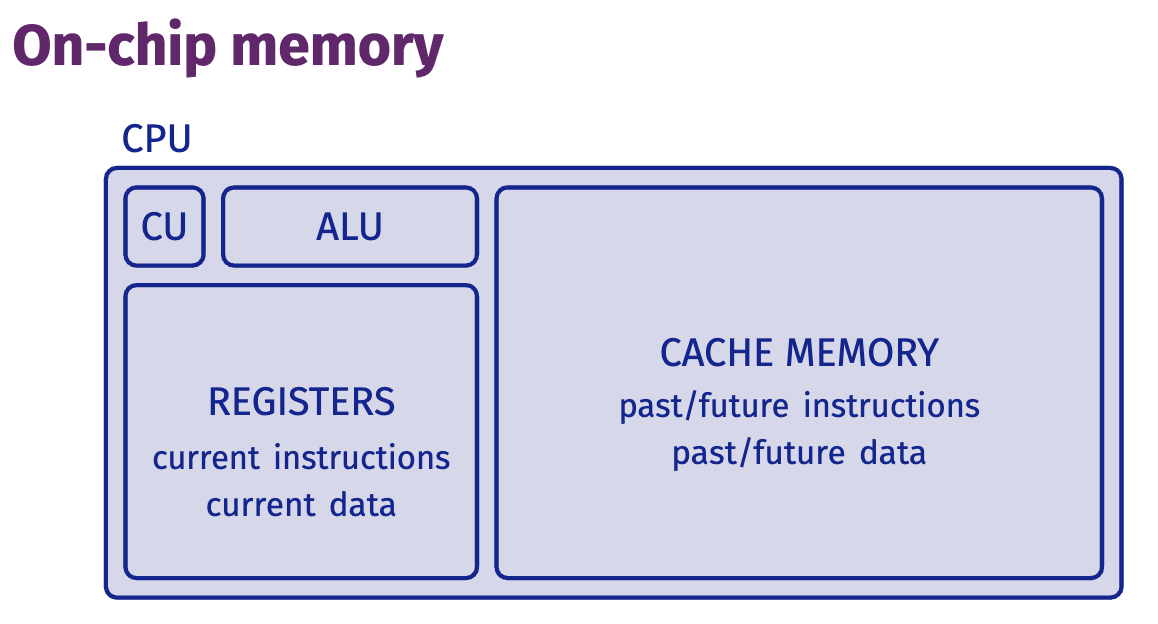
Definitions
Cycle unit of execution of CPU
Frequency # cycles per second (measured in Hz)
Latency # cycles to execute given instruction
Throughput # instructions that can run simultaneously
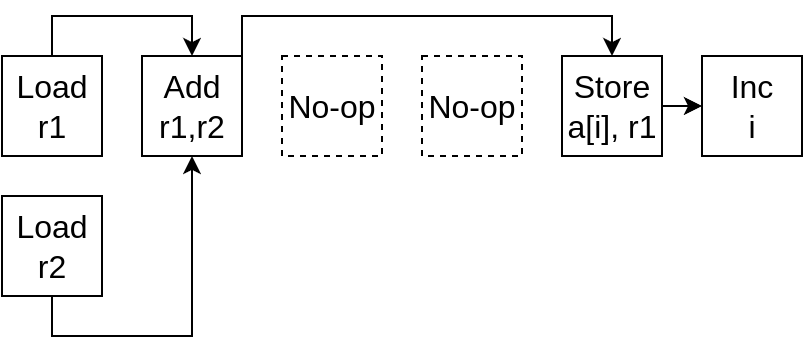
Problem
Most instructions have a latency of more than one clock cycle.
What happens if:
- all instruction have latency 1?
No “wasted” cycles. - ADD has latency 3?
Two “wasted” cycles beforeSTORE.
1
2
3
4
5
LOAD r1 = a[i]
LOAD r2 = b[i]
ADD r1 = r1 + r2
STORE a[i] = r1
INCREMENT i
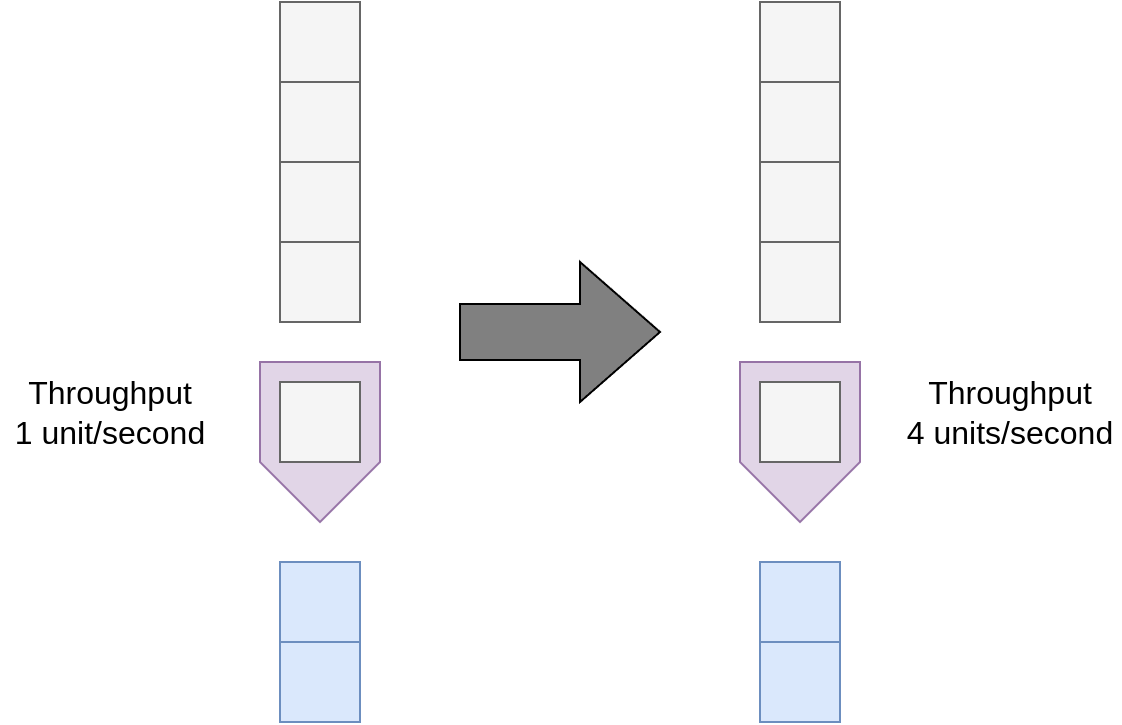
In pictures 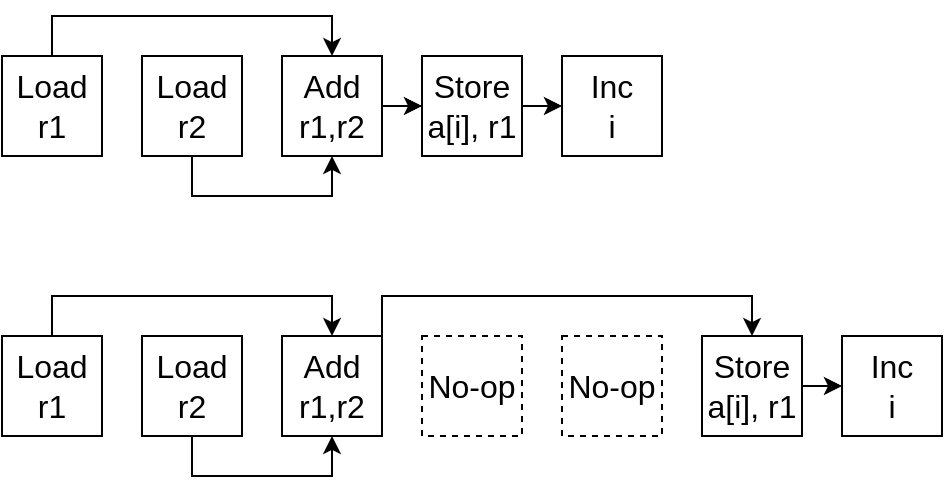
Strategies for faster chips
- Increase clock speed (more cycles per second)
- Parallelism ▶ data-level parallelism ▶ instruction-level parallelism
- Specialisation (optimised hardware units
Increasing clock speed
Easy for the programmer Architecture is unchanged, everything just happens faster!
Limitations ▶ Limited by physical impossibility to cool chip. ▶ Clock speeds have been approximately constant for 10 years
Increasing parallelism
Problems ▶ Need enough parallel work ▶ No dependencies between work ▶ Mostly pushes problem onto programmer
Instruction-level parallelism: pipelining
Split each instruction into ▶ fetch ▶ decode ▶ execute ▶ write and use a pipeline. 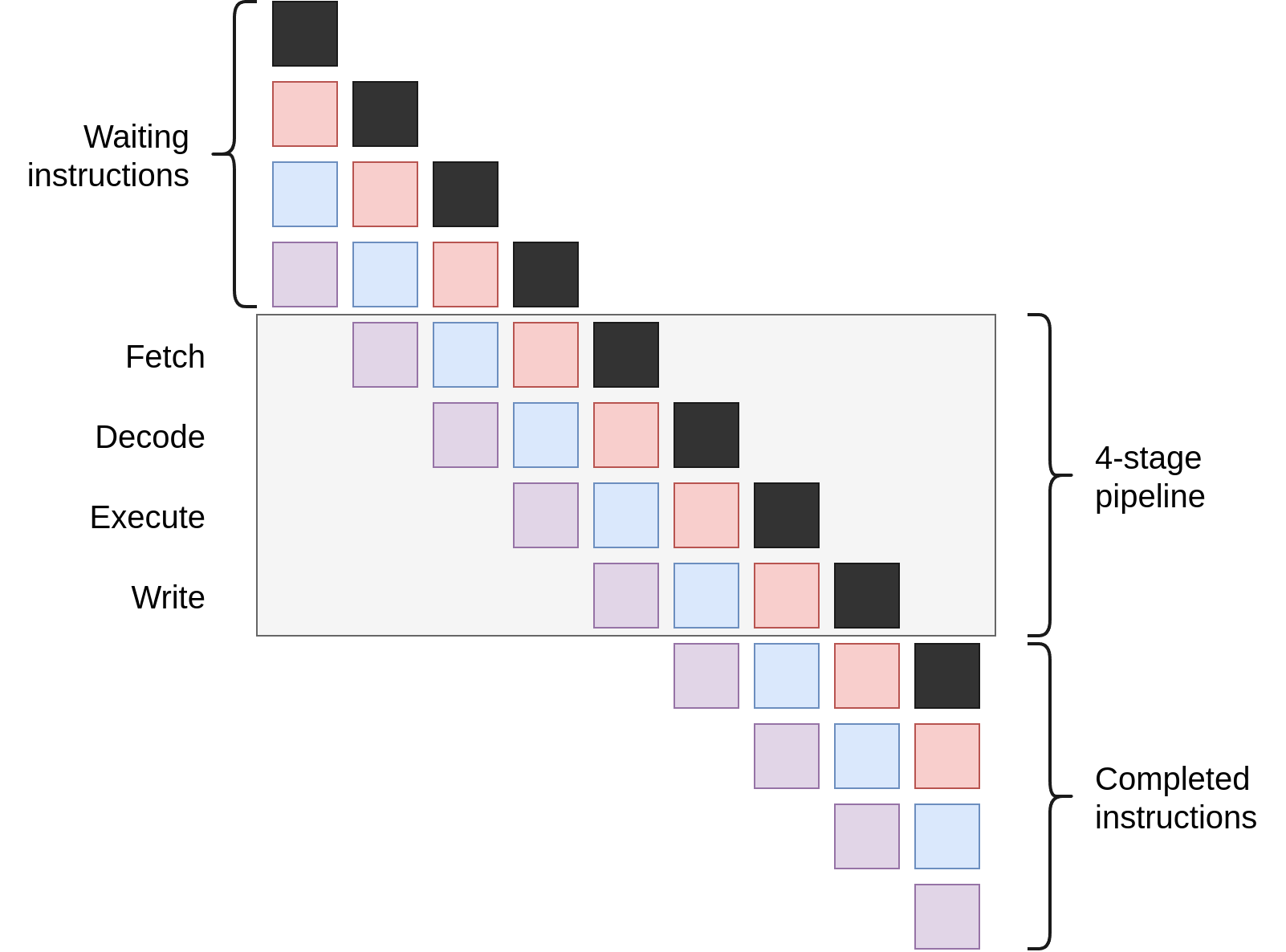
Instruction-level parallelism: superscalar
Instructions with no dependencies can be issued simultaneously
Instruction-level parallelism: out-of-order
Instruction ordering is based on availability of ▶ input data ▶ execution units rather than order in the program.

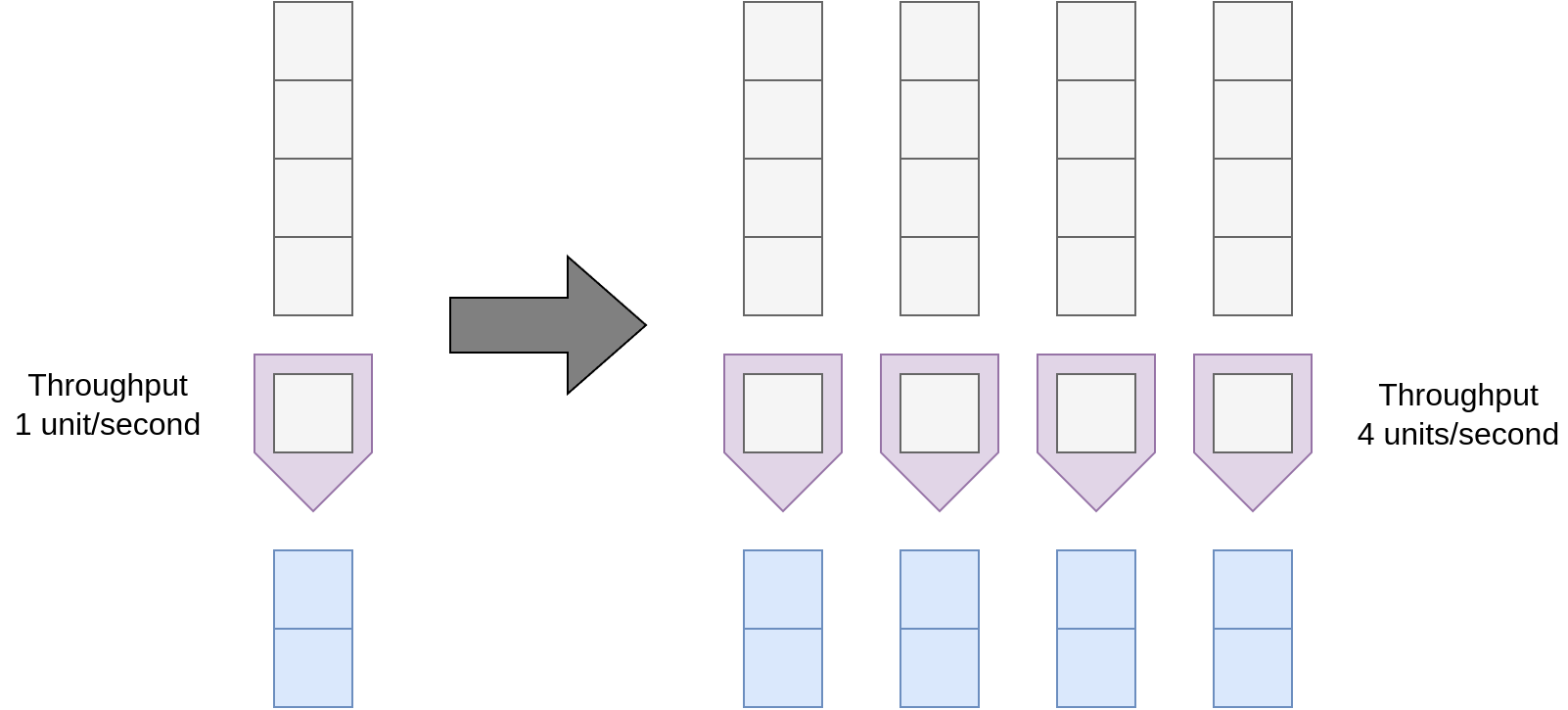
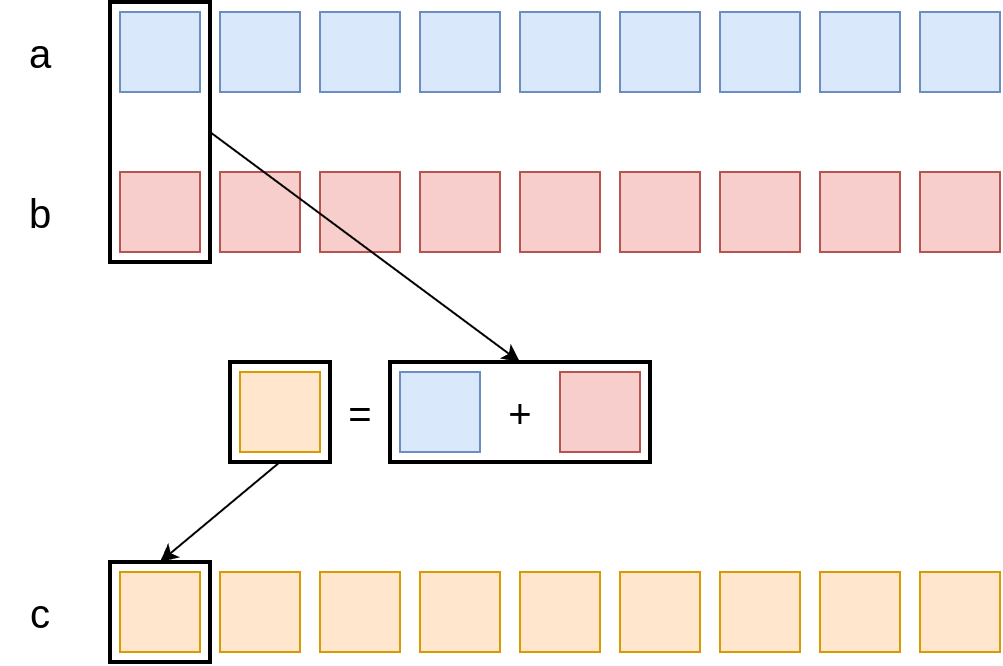
Data parallelism: SIMD vectorisation
Summing arrays again
1
2
3
4
double *a, *b, *c;
...
for (size_t i = 0; i < N; i++)
c[i] = a[i] + b[i];
Instruction throughput can be a bottleneck here.
Vectorisation: make instructions operate on more data at once.
Vectorisation is critical for single-core performance.
SIMD execution
1
2
3
4
double *a, *b, *c;
...
for (i = 0; i < N; i++)
c[i] = a[i] + b[i];
Register width:
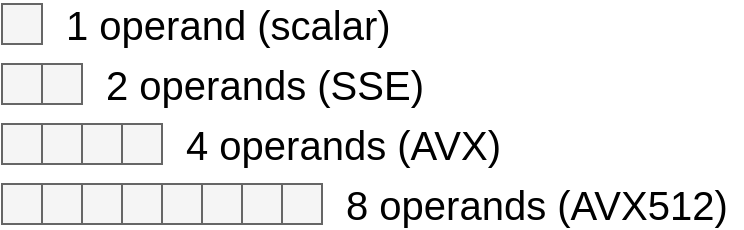
⬆️ Scalar addition
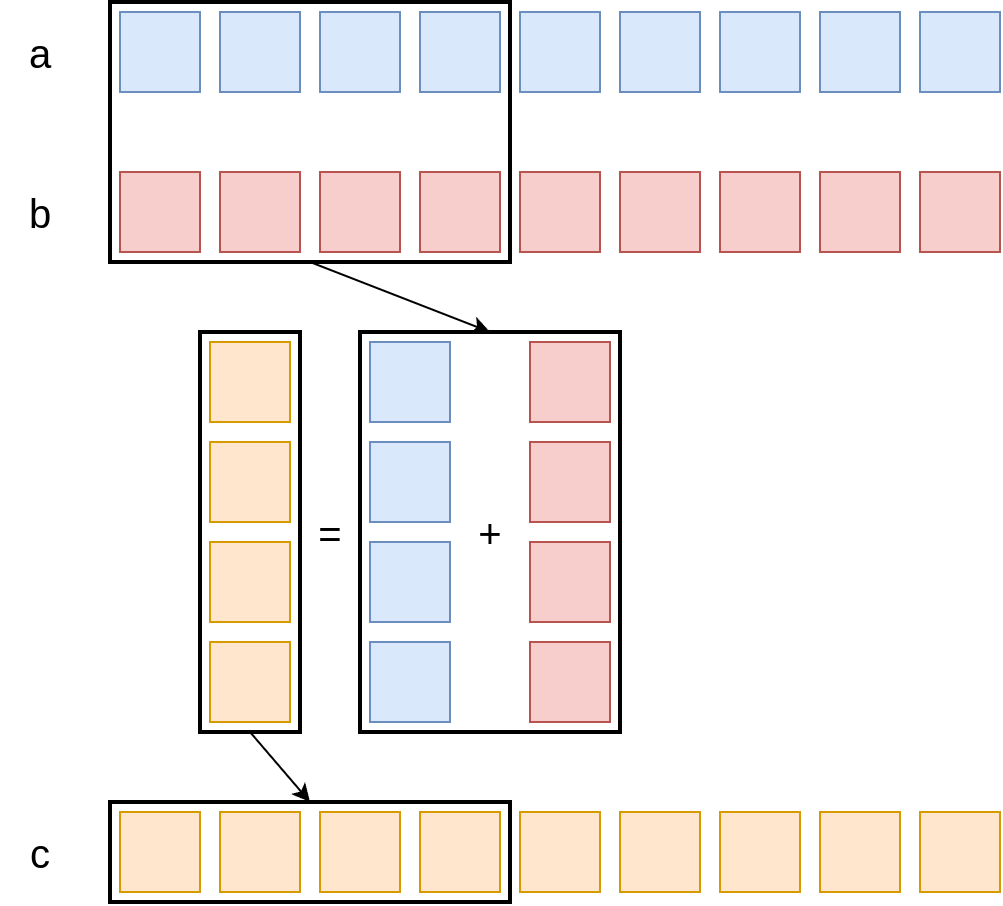 ⬆️ AVX addition
⬆️ AVX addition
Example: sum reduction
How fast can this code run if all data are in L1 cache?
1
2
3
float c = 0;
for (i = 0; i < N; i++)
c += a[i];
Notes ▶ AVX-capable core (vector width: 8 floats) ▶ Loop-carried dependency on summation variable ▶ Execution stalls at every add until the previous one completes
Applicable peak (scalar execution)
Assembly pseudo-code
LOAD r1.0 ← 0
i ← 0
loop:
LOAD r2.0 ← a[i]
ADD r1.0 ← r1.0 + r2.0
i ← i + 1
if i < N: loop
result ← r1.0
Only one SIMD lane
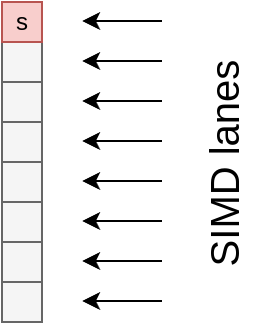
Runs at 1/8 of possible ADD peak.
Applicable peak (SIMD execution)
LOAD [r1.0, ..., r1.7] ← [0, ..., 0]
i ← 0
loop:
LOAD [r2.0, ..., r2.7] ← [a[i], ..., a[i+7]]
ADD r1 ← r1 + r2 // SIMD ADD
i ← i + 8
if i < N: loop
result ← r1.0 + r1.1 + ... + r1.7
Using all eight SIMD lanes
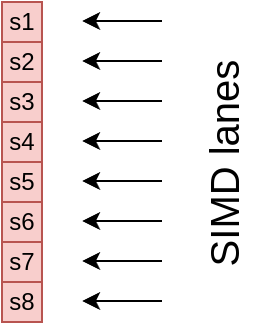
Runs at ADD peak.
[[2025-01-13-1excercise]] [[2025-01-19-PO-Lecture-2-Memory-Hierarchy]]
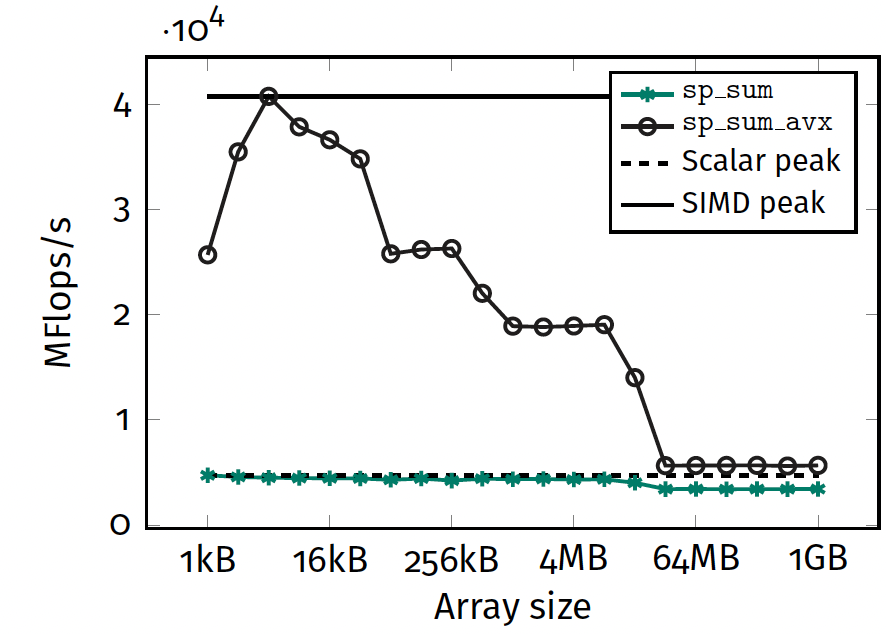
Exercise 1: Benchmarking Sum Reduction
- Split into small groups
- Make sure one person per group has access to Hamilton
- Benchmark sum reduction to confirm this “theoretical” effect.
- Ask questions!
Exercise 1: results
- SIMD: 4 plateaus
- Scalar: 3 plateaus
Conclusions
- Modern computer hardware is quite complex
- For simple things we can try to figure our performance limits
- Typically we must benchmark to confirm hypotheses
- We must find bottlenecks before starting to optimise
Next: memory hierarchy and first models of performance.