PO Lecture 2 Memory Hierarchy
作业回顾
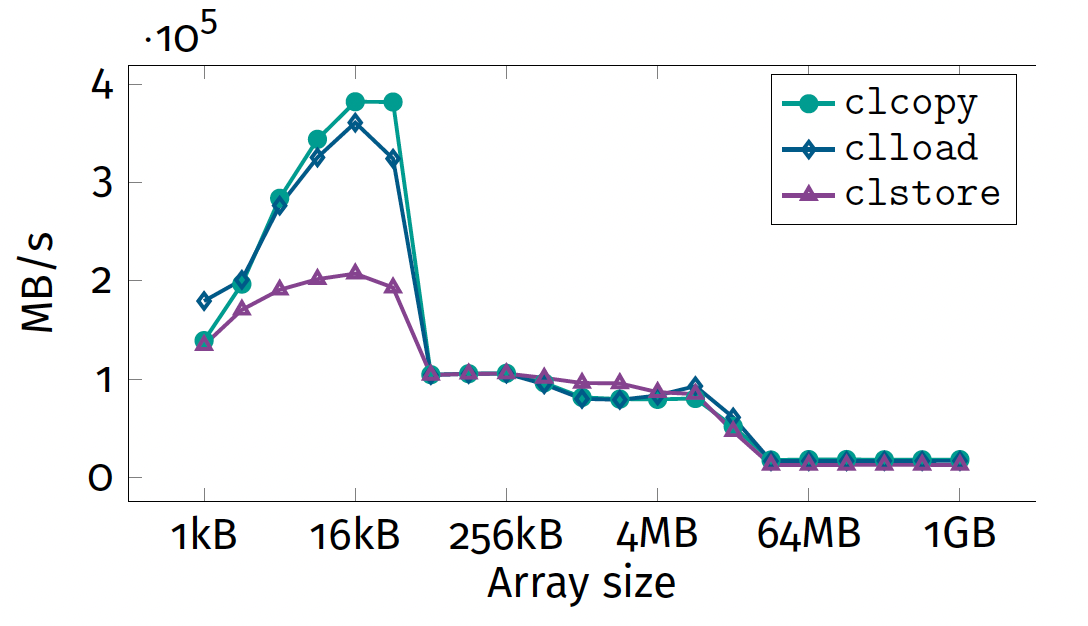
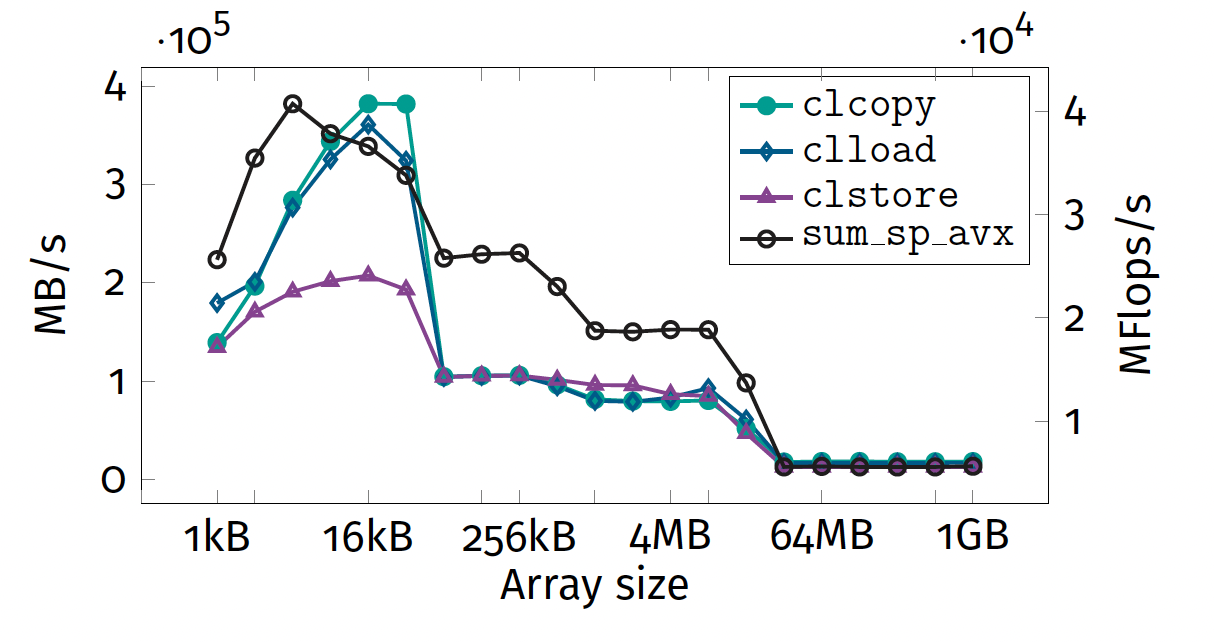
Sum reduction benchmark (Exercise 1)
- SIMD: 4 plateaus
- scalar: 3 plateaus
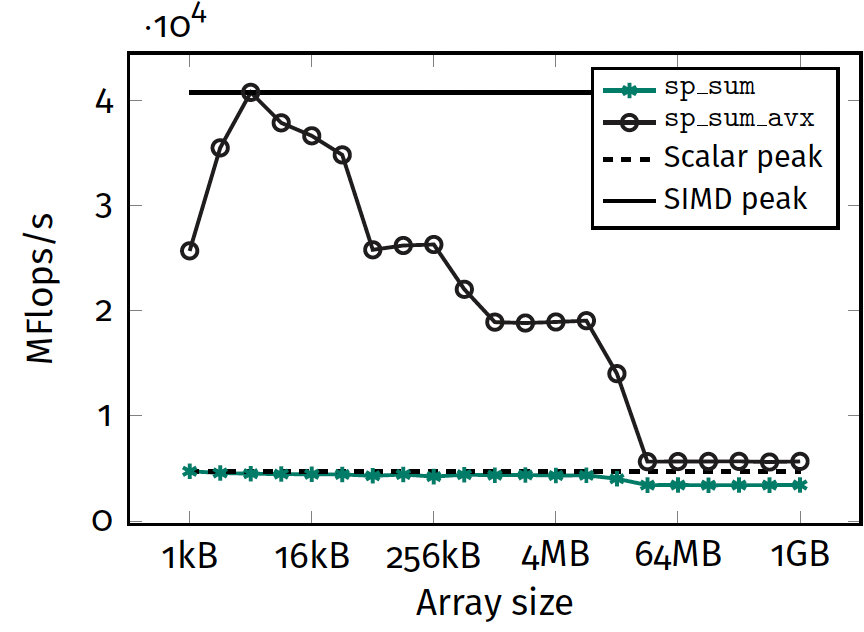
Performance peak
Variability This is due to CPU Boosting.
Question SIMD code does not achieve theoretical peak for all sizes. Why?
Hardware bottlenecks
- Cannot be instruction throughput.
- Memory bandwidth decreases with vector siz
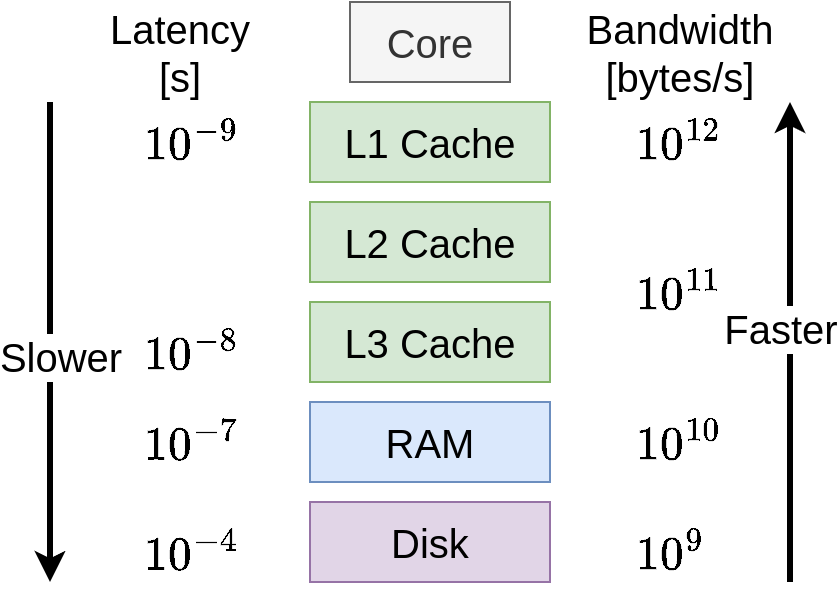
Memory Hierarchy
Two types of memory:
▶ small and fast
▶ large and slow
Large and fast is impossible:
⇒ physics gets in the way.
Optimisation: refactor algorithms to keep data in fast memory.
Check Colin Scott’s page for more detail on latencies.
Cache memory: overview
Features
- Hierarchy of small, fast memory.
- Keep a copy of frequently used data for faster access.
Issues
- Frequently accessed data not known a priori.
- Only heuristics are possible → principle of locality.
Principle of locality
- Frequently accessed data often unknown before execution
- In practice, most programs exhibit locality of data access.
- Optimised algorithms attempt to exploit this locality.
Temporal locality If I access data at some memory address, it is likely that I will do so again “soon”.
Spatial locality If I access data at some memory address, it is likely that I will access neighbouring addresses.
Temporal locality
On first access to a new address, the data is:
- loaded from main memory to registers
- stored in cache
Temporal locality
On first access to a new address, the data is:
- loaded from main memory to registers
- stored in cache
Trade-off solution:
- Small performance penalty for first access (storing is not free)
- Subsequent accesses use cached copy and are much faster.
Spatial locality
On first access to a new address, the data is:
- loaded from main memory to registers
- stored in cache
- neighbouring addressed are also stored in cache
Trade-off solution:
- Large performance penalty for first access
- Subsequent accesses to neighbouring data will be fast
Example: sum reduction
1
2
3
float s[16] = 0;
for (i = 0; i < N; i++)
s[i%16] += a[i];
- Temporal locality
- 16 entries of
sare accessed repeatedly - Makes sense to keep all of
sin cache
- 16 entries of
- Spatial locality
- Contiguous entries of
aare accessed - When loading
a[i]it makes sense to loada[i+1]too.
- Contiguous entries of
Designing a cache
Important questions
- When we load data into the cache, where do we put it?
- If we have an address, how do determine if it is in the cache?
- What do we do when the cache becomes full?
- Each datum uniquely referenced by its K-bit address
- Need to turn this large memory address into a cache location
- K is typically large ($2^{32} / 2^{64}$ addresses)
Direct mapped cache
- Cache can store $2^N$ bytes
- Divided into challenges (or cache lines) each of $2^M$ bytes
- Each address references one byte
- Use N bits of address to select which slot in the cache to use
Simplest solution: injection from RAM to cache
Direct mapped caches: indexing
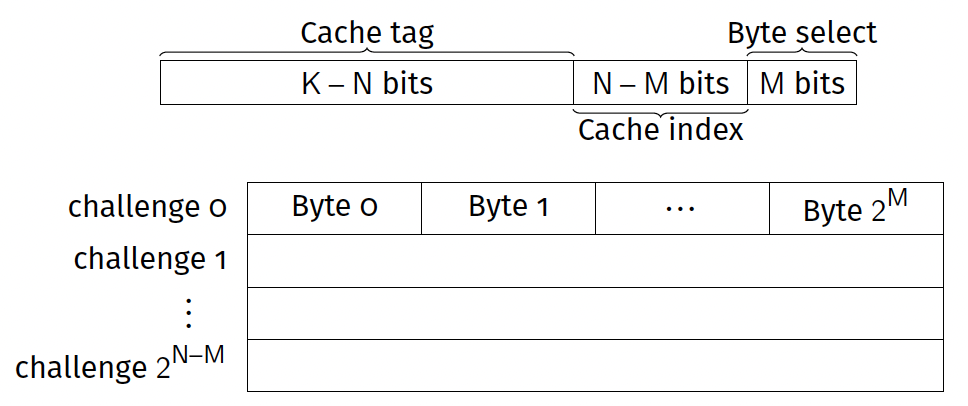
- Byte select: Use lowest M bits to select correct byte in challenge.
- Cache index: Use next N – M bits to select correct challenge.
- Cache tag: Use remaining K – N bits as a key.
Choice of cache line size
- Data is loaded one cache line at a time
- Immediately exploits spatial locality
- Larger cache lines are not always better
- Almost all modern CPUs use 64-byte size
Rule of thumb Cache-friendly algorithms work on cache line-sized chunks of data.
Direct mapped caches: eviction
- Conflict: two addresses have the same low bit pattern
- Resolution: newest loaded address wins.
- This is a least recently used (LRU) eviction policy.
What can go wrong?
1
2
3
4
int a[64], b[64], r = 0;
for (int i = 0; i < 100; i++)
for (int j = 0; j < 64; j++)
r += a[j] + b[j];
- 1KB cache
- 32-byte challenge size
- So N = 10, M = 5
- 32 challenges in the cache
Conflicts reduce effective cache size
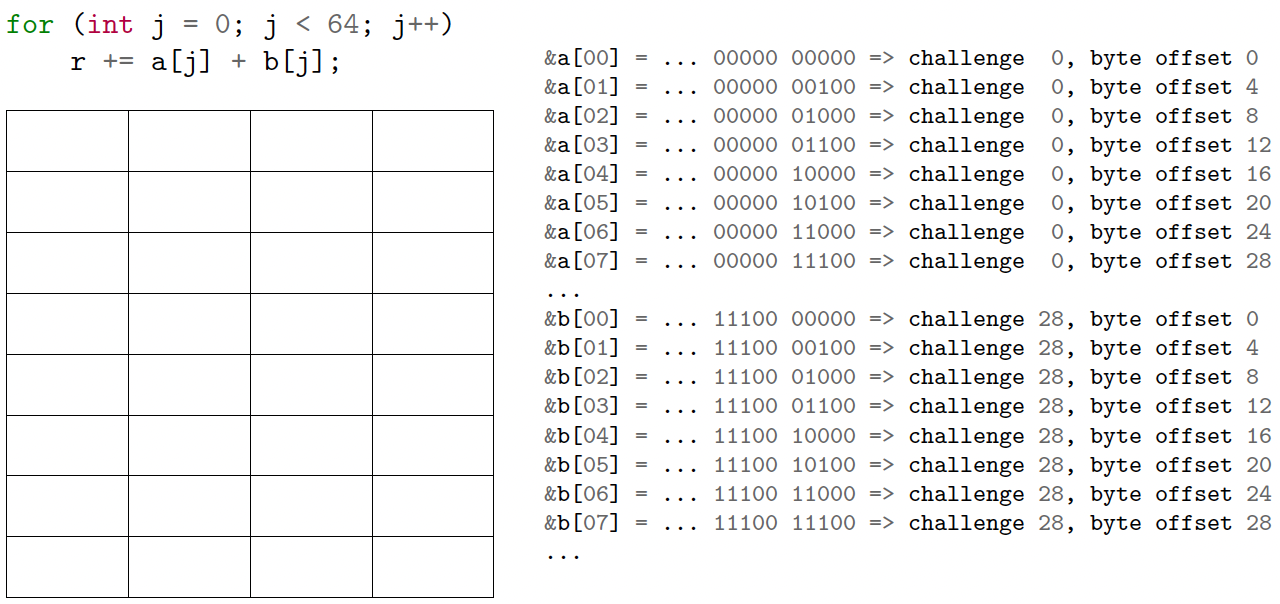
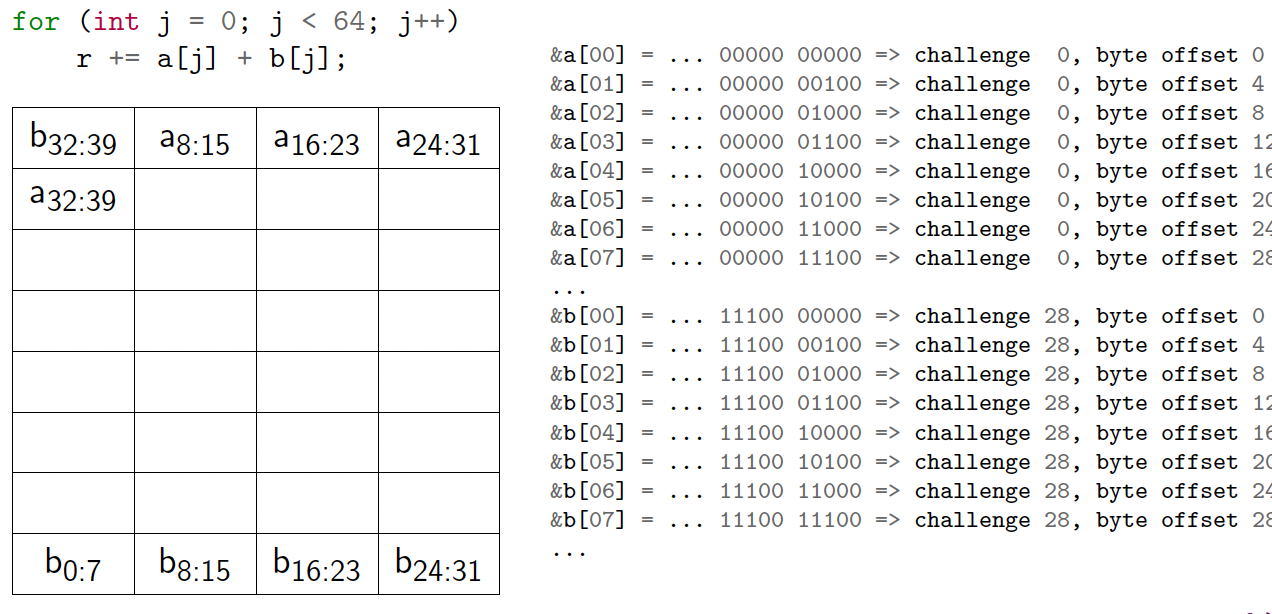
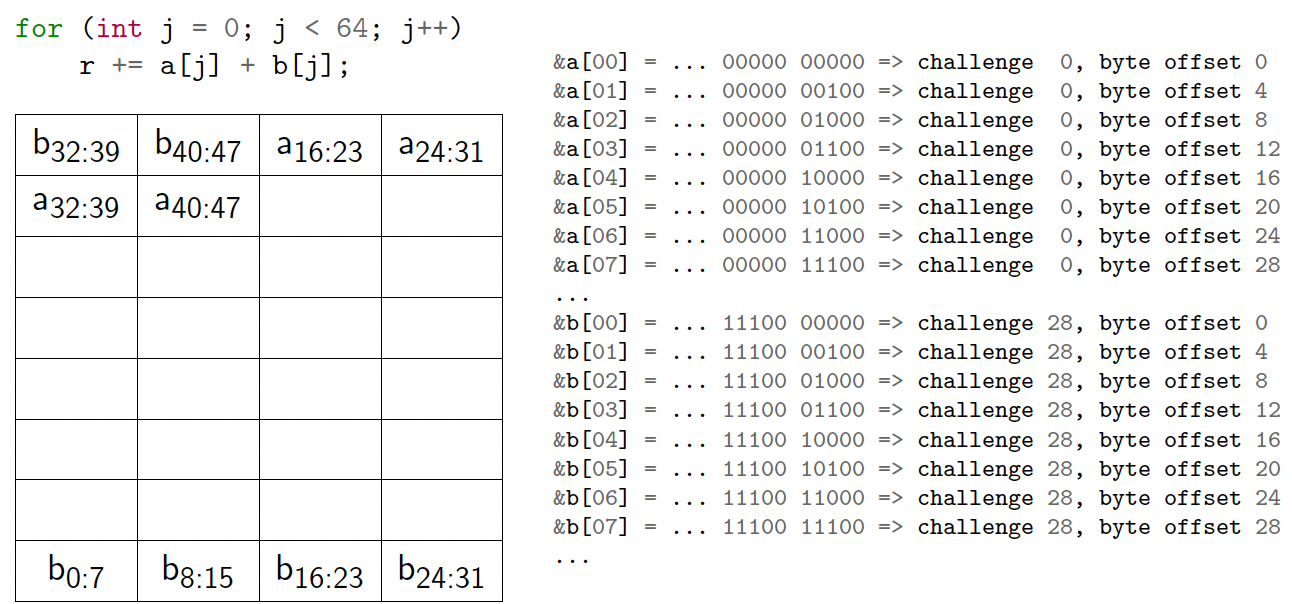
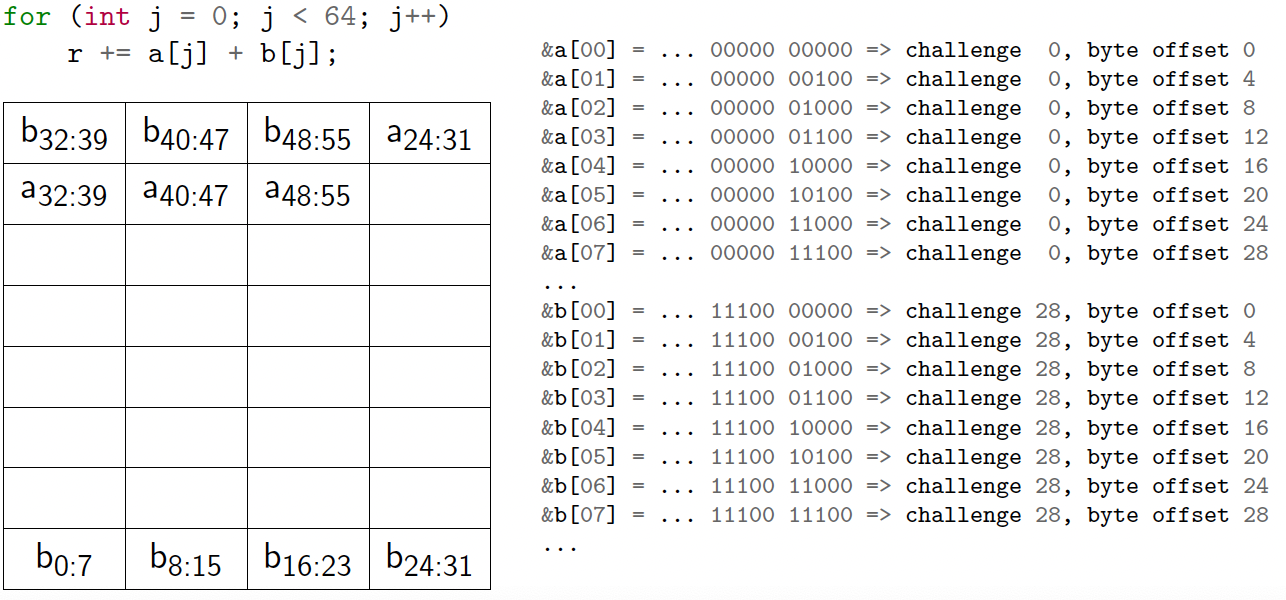
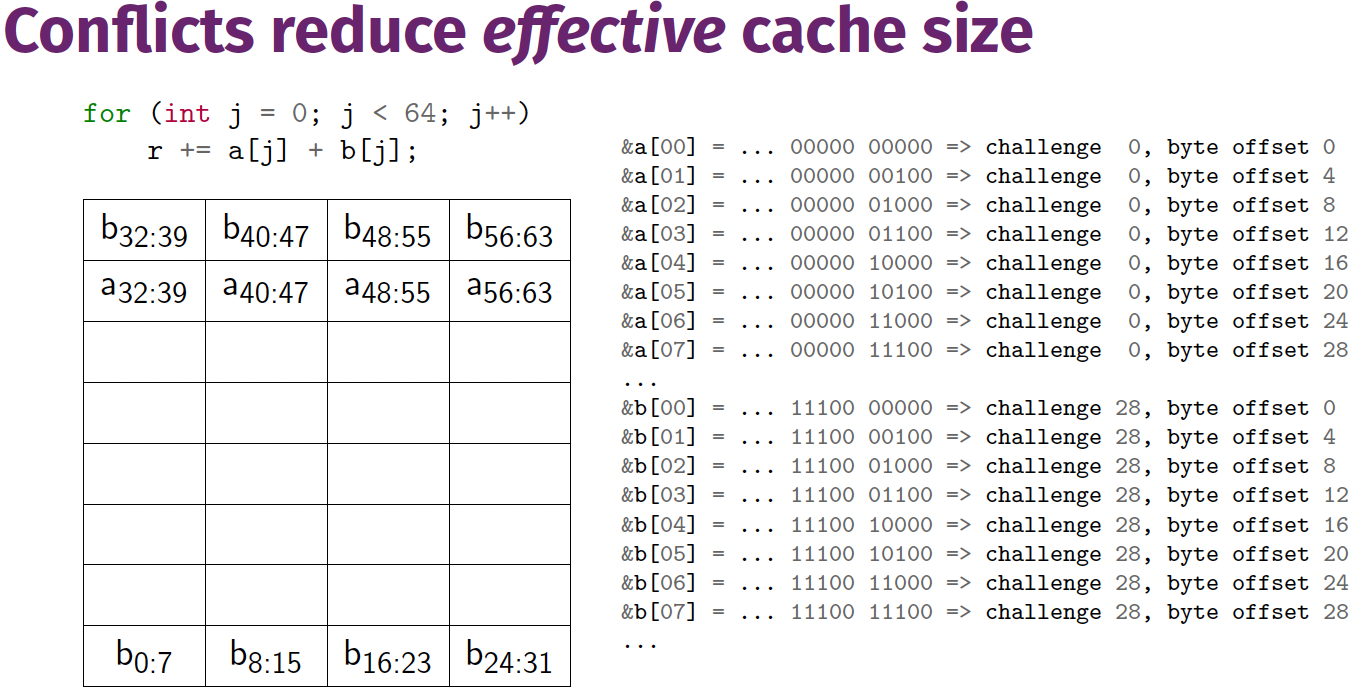
Cache thrashing
What can go wrong?
1
2
3
4
int A[64], B[64], r = 0;
for (int i = 0; i < 100; i++)
for (int j = 0; j < 64; j++)
r += A[j] + B[j];
- 1KB cache
- 32 byte challenge size
So N = 10, M = 5. 32 challenges in the cache.
- We need $2 \cdot 64 \cdot 4 = 512$ bytes to store A and B in cache.
- This only requires 16 challenges, so our cache is large enough.
- If low bits of addresses match, same cache lines are mapped.
- In the worst case, every load of $B[j]$ evicts $A[j]$, and vice versa.
Cache associativity
- Direct mapped
- Each RAM challenge maps to exactly one cache line.
- LRU eviction policy (new data overwrite old)
- Fully associative
- Each RAM byte can map to any cache line
- Data is stored in first unused cache line
- If all lines are used, overall LRU one is replaced
- Most flexible, but also most expensive
k-way set associative cache
- k “copies” of a direct mapped cache.
- Each challenge from main memory maps to k cache lines, called sets.
- Typically use LRU eviction.
- Usual choice: N ∈ {2, 4, 8, 16}.
- Skylake has N = 8 for L1, N = 16 for L2, N = 11 for L3.
Exercises 2/3: memory bandwidth/saturation
Split into small groups
Make sure one person per group has access to Hamilton
Benchmark memory bandwidth as a function of vector size
You can use the bash script from last week.
Ask questions!
Exercise 2: results
 [[2025-01-20-PO-3]]
[[2025-01-20-PO-3]]