Robotics 5 - Manipulator Kinematics
Robotics 5 - Manipulator Kinematics
From @VergilOP
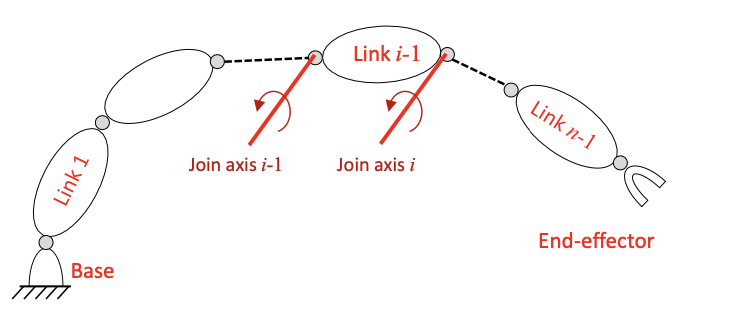
Lecture 5 - Manipulator Kinematics
Learning Objectives
- Objectives
- Link Description
- Denavit-Hartenberg(D-H parameters)
- Manipulator Kinematics
Link Description
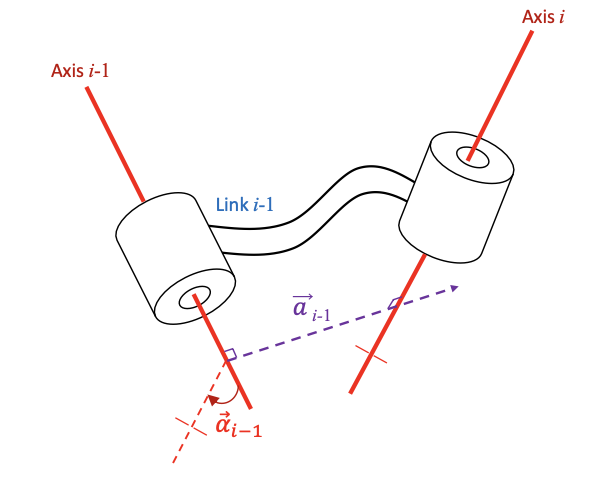
- $\vec{a}_{i-1}$: Link Length - mutual perpendicular 连杆长度
- $\vec{\alpha}_{i-1}$: Link Twist - angle between axes轴 $i$ and $i-1$ 连杆扭角
Link Connection:
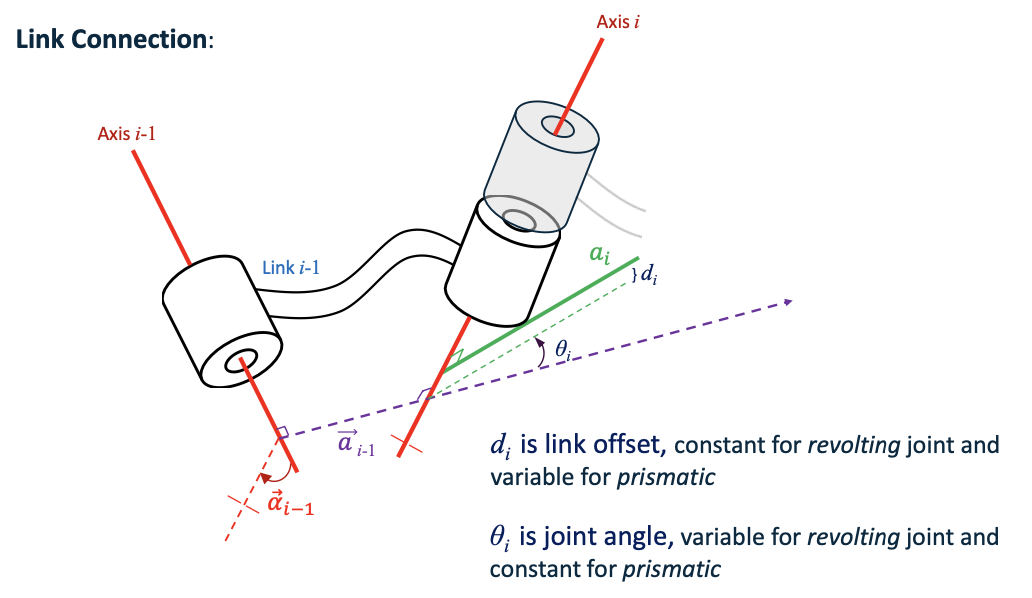
$d_i$ is link offset, constant for revolting joint and variable for prismatic 关节偏距
定义:$d_i$是沿着$Z_i$轴,从$X_{i-1}$轴移动到$X_i$轴所需的距离。
特性:
- 对于旋转关节:$d_i$是一个常数,因为旋转关节的运动不影响沿$Z_i$轴的距离。
- 对于移动关节:$d_i$是一个变量,因为移动关节的运动就是沿$Z_i$轴的线性移动。
$\theta_i$ is joint angle, variable for revolting joint and constant for prismatic 关节角度
First and last links:
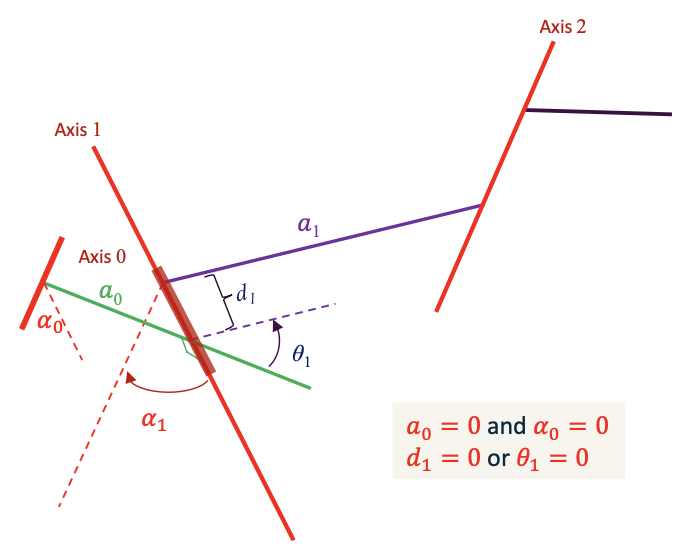
$a_i$ and $\alpha_i$ depend on joint axes $i$ and $i + 1$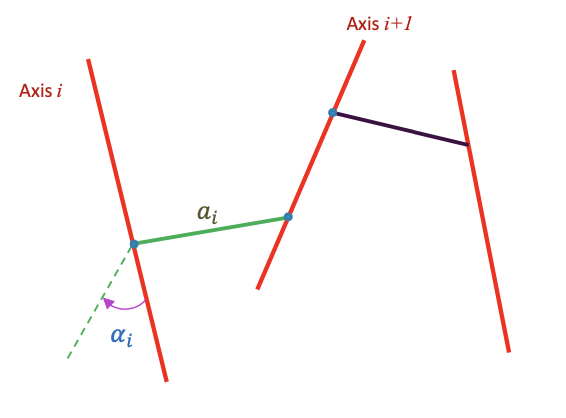
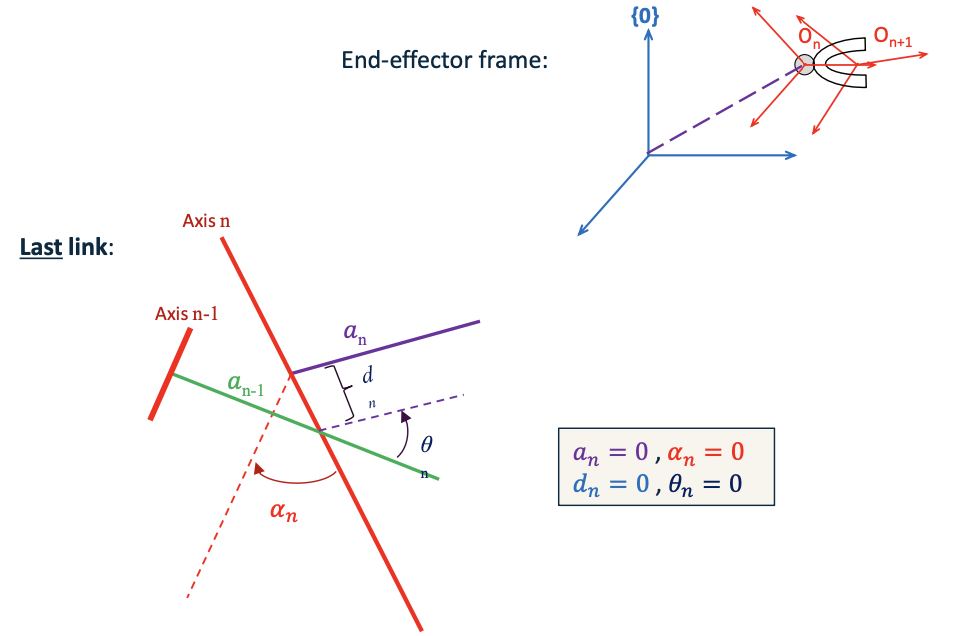
Convention: \(a_0 = a_n = 0 \text{ and } \alpha_0 = \alpha_n = 0\)
First link:
Last link:
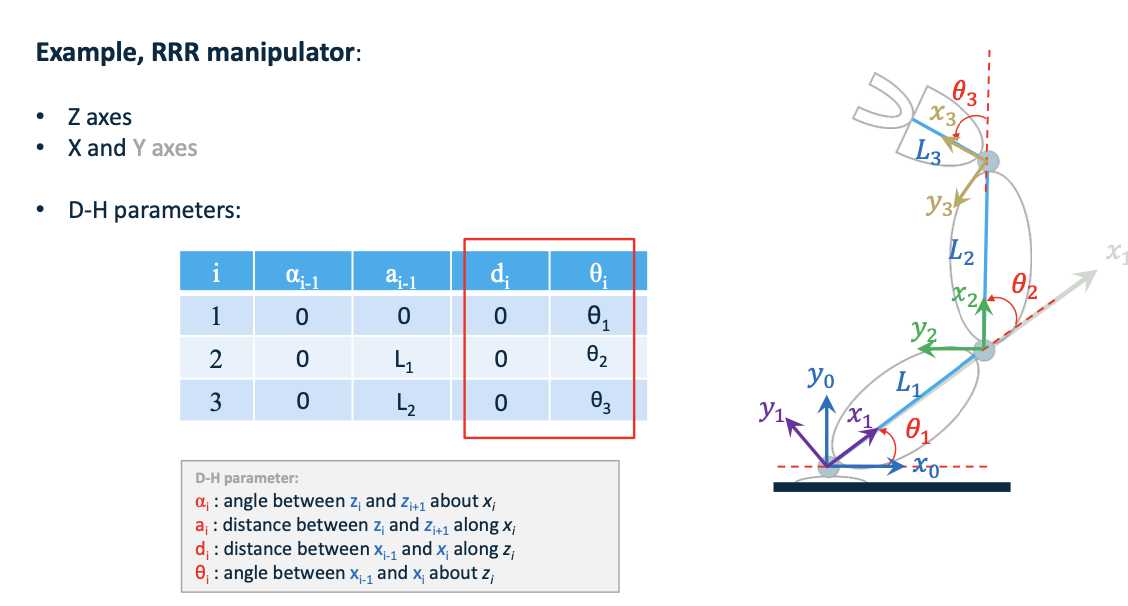
- Denavit-Hartenberg(D-H) Parameters:
- Four D-H parameters are $(\alpha_i, a_i, d_i, \theta_i)$
- Three fixed link parameters and
- One joint variable:
- \[\left\{\begin{array}{ll}\theta_i & \text{Revolute joint} \\ Sd_i & \text{Prismatic joint}\end{array}\right.\]
- $\alpha_i$ and $a_i$ describe the link $i$
- $d_i$ and $\theta_i$ connection between the links
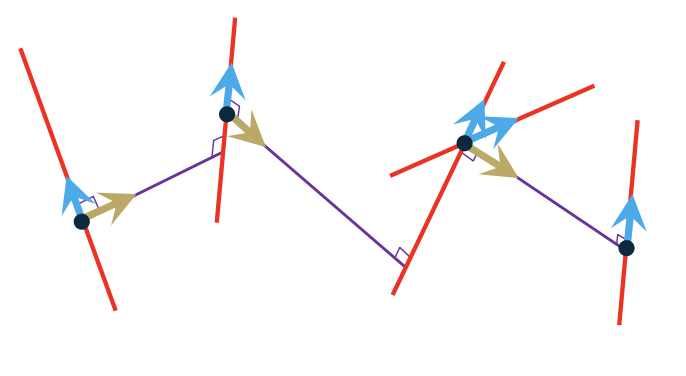
Frame attachment
- Common Normals
- Origins
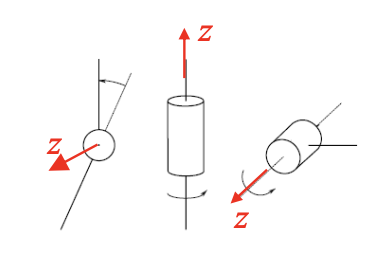
- Z-axis
- X-axis
Summary
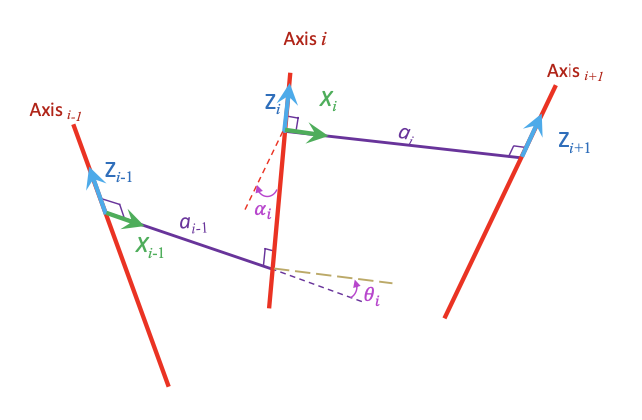
$\alpha_i$: angle between $z_i$ and $z_{i+1}$ about $x_i$
$a_i$: distance between $z_i$ and $z_{i+1}$ along $x_i$
$d_i$: distance between $x_{i-1}$ and $x_i$ along $z_i$
$\theta_i$: angle between $x_{i-1}$ and $x_i$ about $z_i$
Forward Kinematics:
\[{}^{i-1}_i T(\alpha_{i-1}, a_{i-1}, \theta_i, d_i) = R_x(\alpha_{i-1}) D_x(a_{i-1}) R_z(\theta_i) D_z(d_i)\] \[{}^{i-1}_i T = \begin{bmatrix} c\theta_i & -s\theta_i c\alpha_{i-1} & s\theta_i s\alpha_{i-1} & a_{i-1} c\theta_i \\ s\theta_i & c\theta_i c\alpha_{i-1} & -c\theta_i s\alpha_{i-1} & a_{i-1} s\theta_i \\ 0 & s\alpha_{i-1} & c\alpha_{i-1} & d_i \\ 0 & 0 & 0 & 1 \end{bmatrix}\]
\(^{i-1}_iT = ^{i-1}_RT\ ^R_QT\ ^Q_PT\ ^P_iT\)Symbols:
- Revolute Joints:
- Prismatic joints:
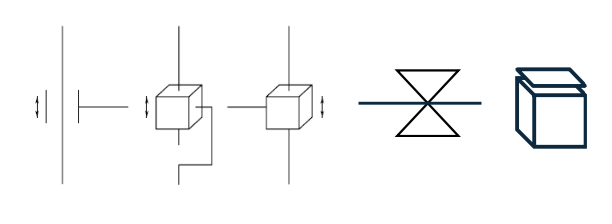
- Revolute Joints:
This post is licensed under CC BY 4.0 by the author.