Robotics Review
10倒计算题
- L2 气缸压力
- 机械臂 关节 自由度 冗余度
- 坐标系变换 transformation 旋转矩阵
- alpha a d theta Manipulator Kinematics
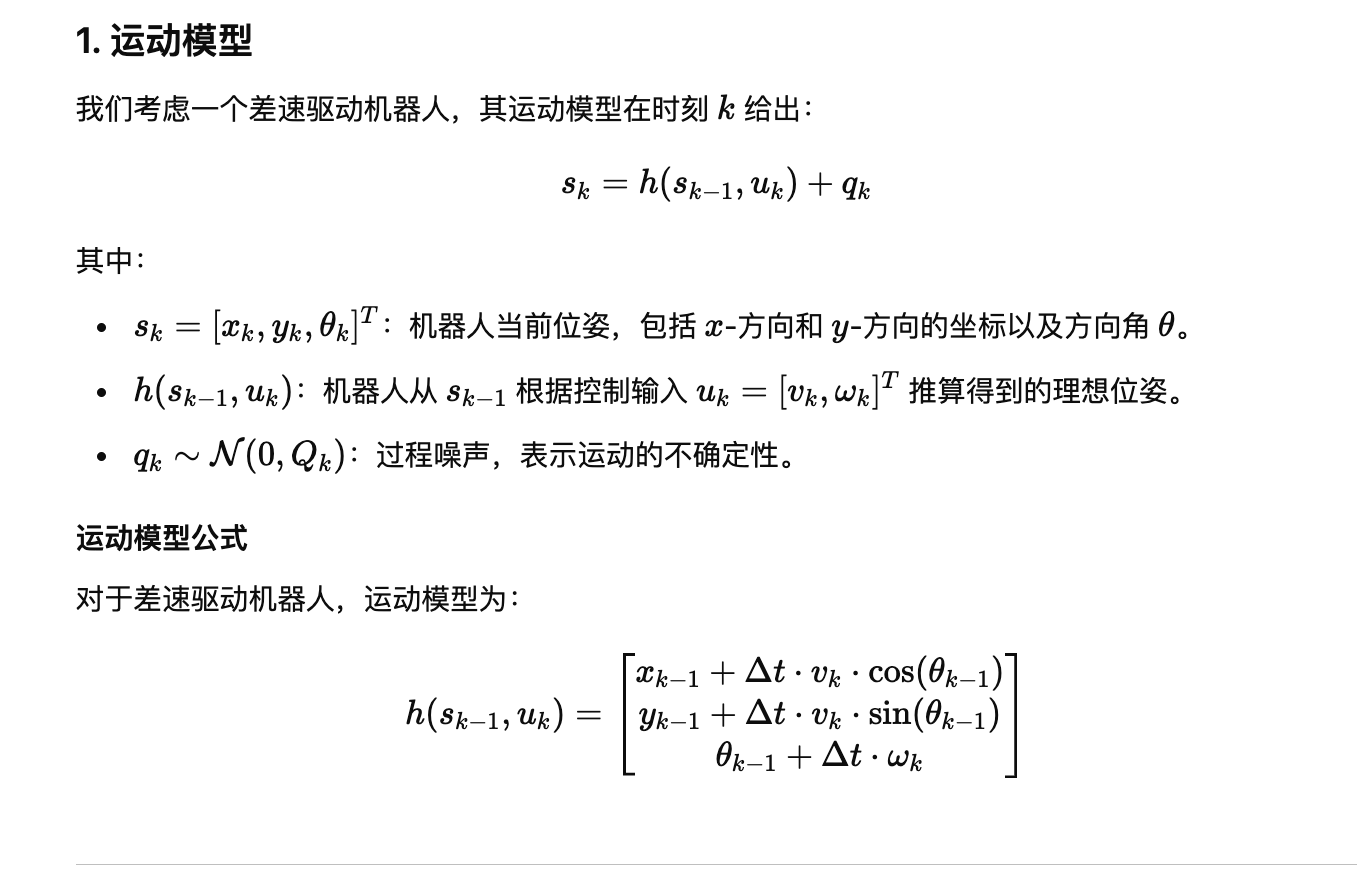
- 车 omega 差速
- 高斯误差 s x t theta
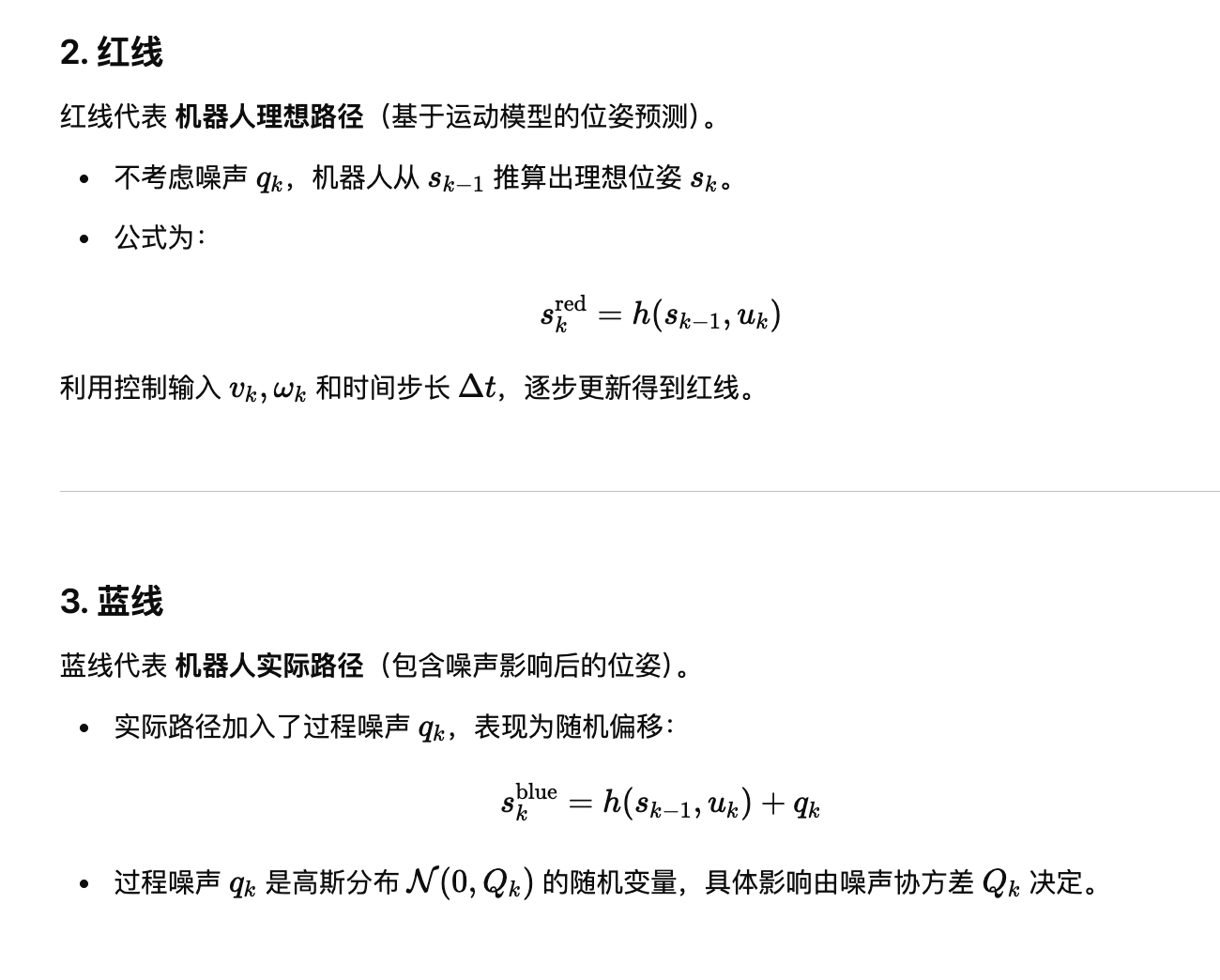
- hk sk qk
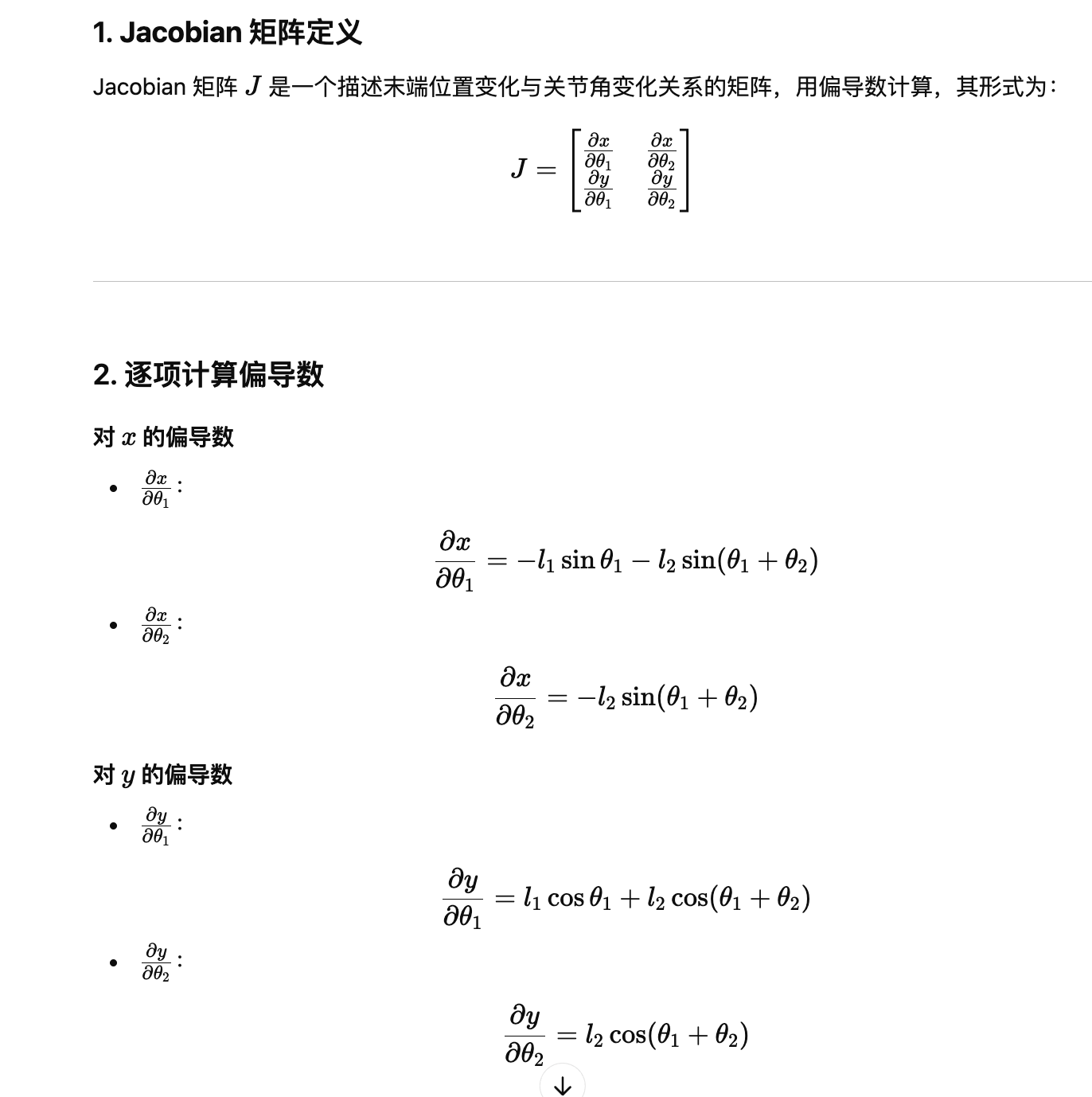
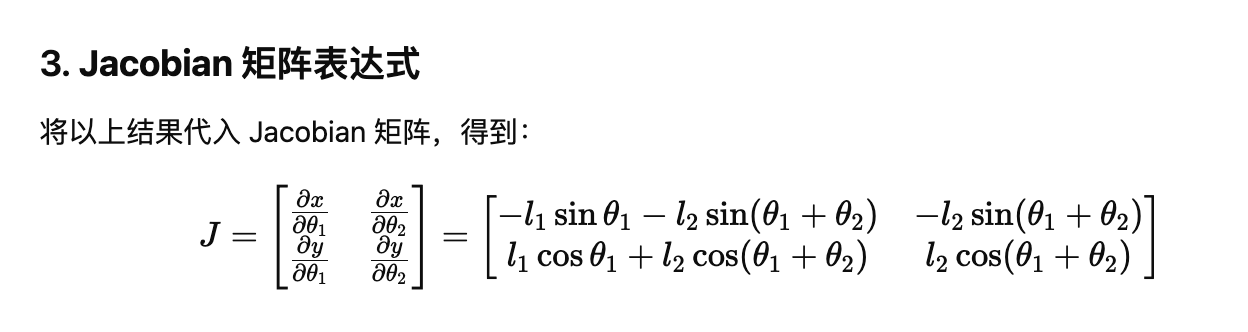
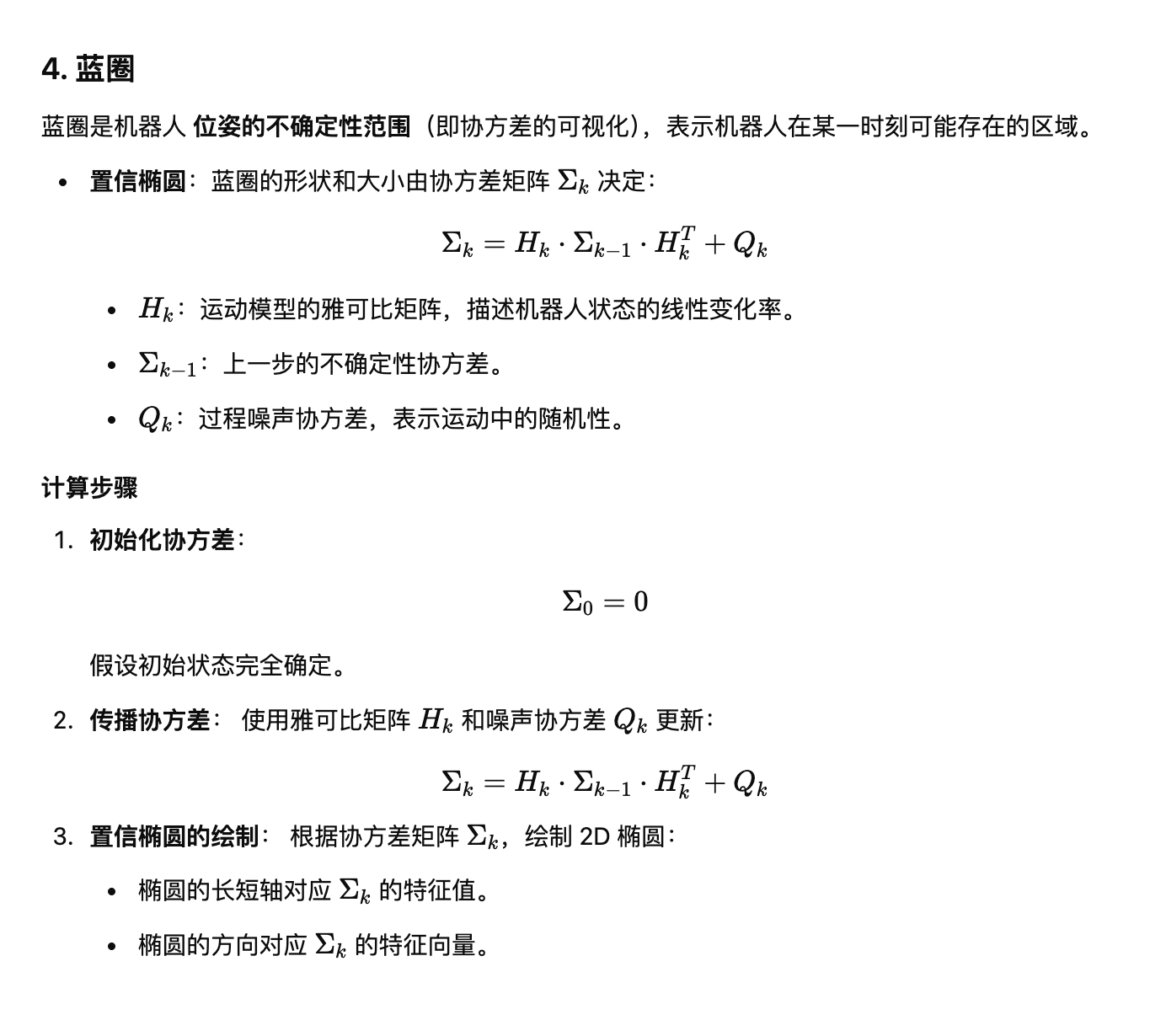
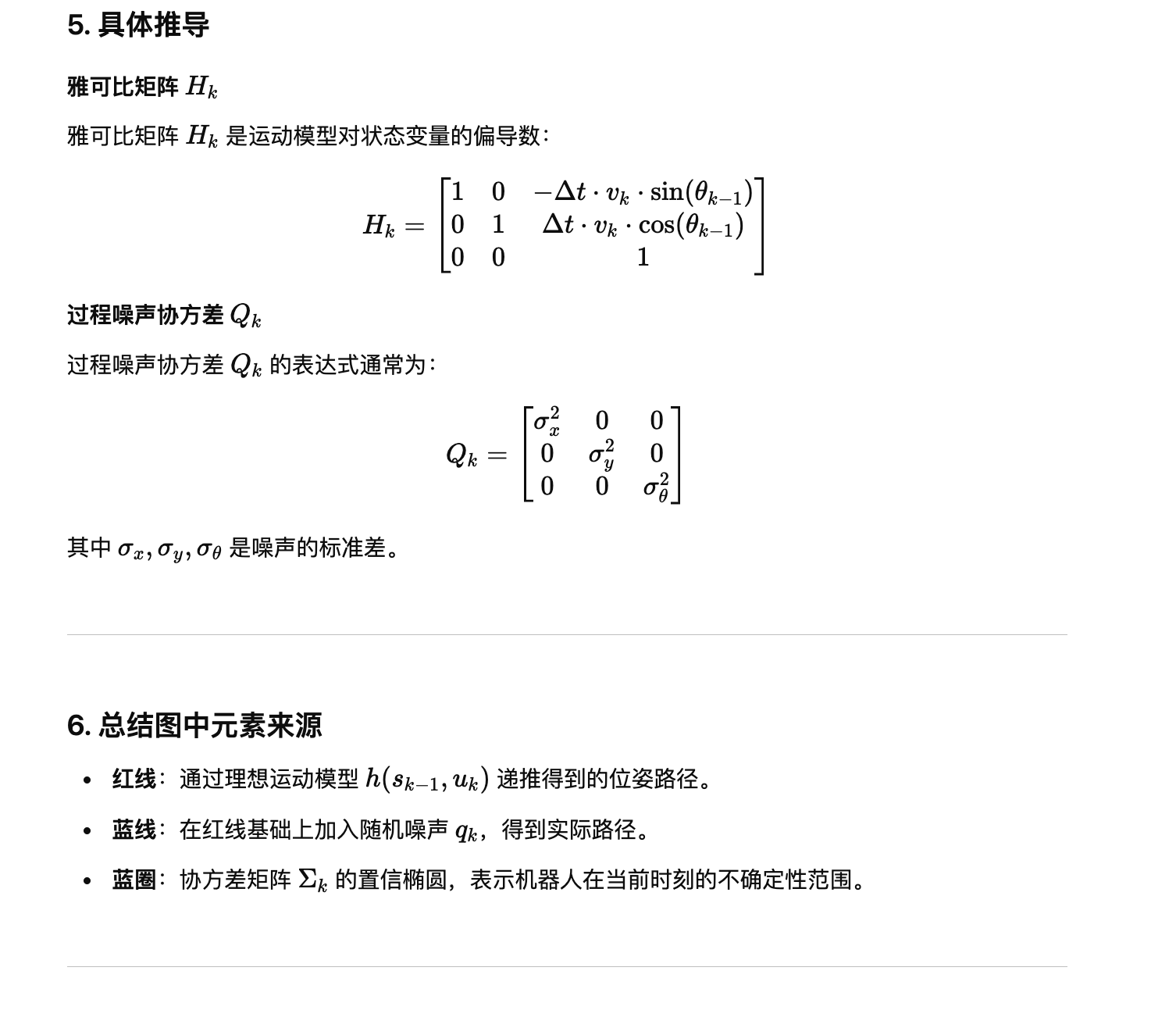
- 雅可比矩阵 (带入?)
- ? Localisation
- ??控制 PID
- A* 路径规划
- Probabilistic Mapping 算概率
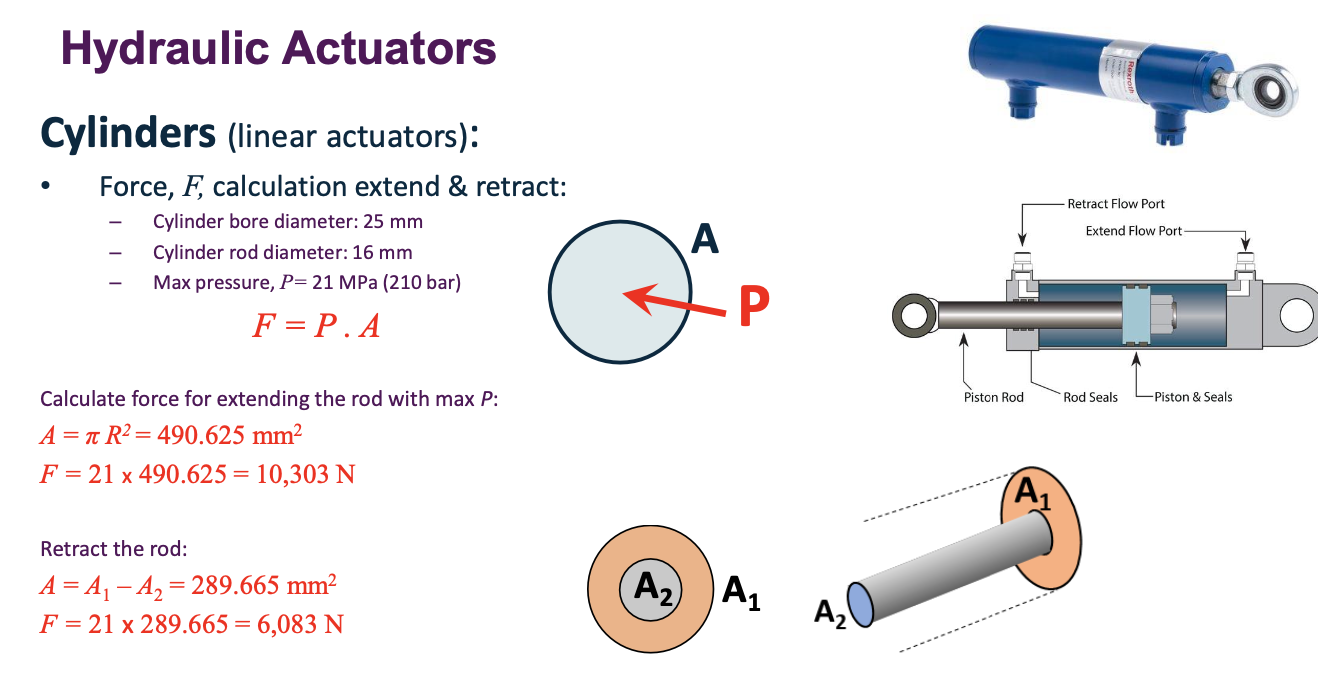
1 Cylinders
2
- 每个刚体需要 6 个参数来描述 – 3 个位置 – 3 个方向
n 个移动连杆 → 6n 个参数 n 个关节 → 5n 个约束 有多少个自由度? 6n – 5n = n 个自由度
$m_0$是末端执行器的自由度
max -> 6
冗余度 (n > m) n - m
3 坐标系变换 旋转矩阵
- $^B_AR$ 坐标系A到坐标系B的旋转矩阵
eg.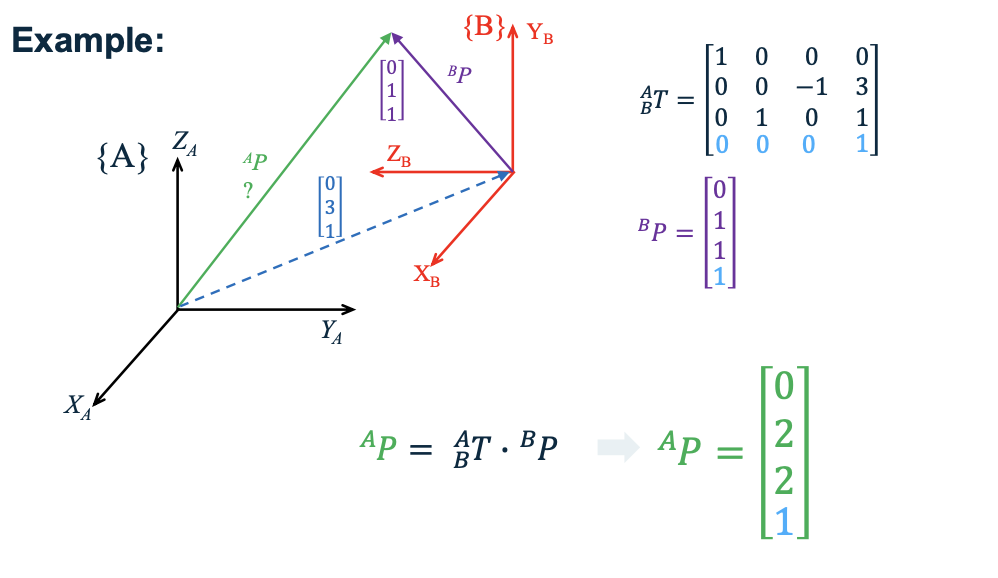
Inverse Transform 逆变换 \(^A_B T = \begin{bmatrix} ^A_B R & ^A P_{Borg} \\ 0\ 0\ 0 & 1 \end{bmatrix}\)
\[^A_B T^{-1} = ^B_A T = \begin{bmatrix} ^A_B R^T & -^A_B R^T \cdot\ ^AP_{Borg} \\ 0\ 0\ 0 & 1 \end{bmatrix}\]
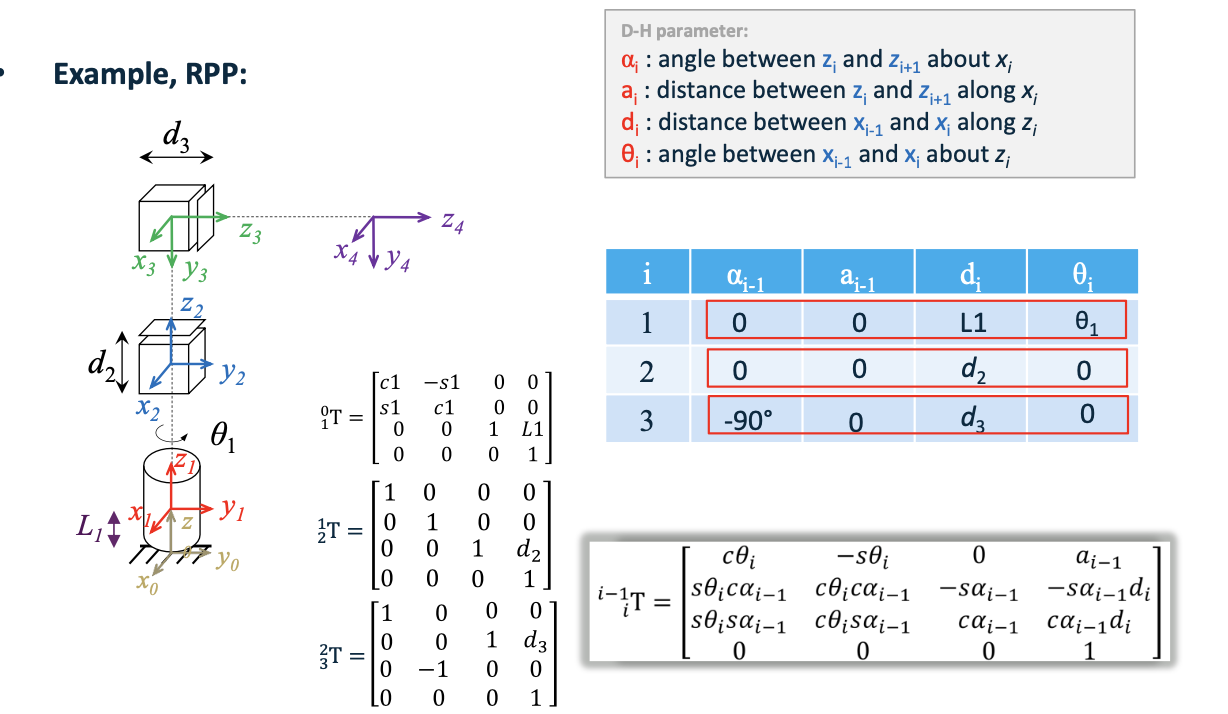
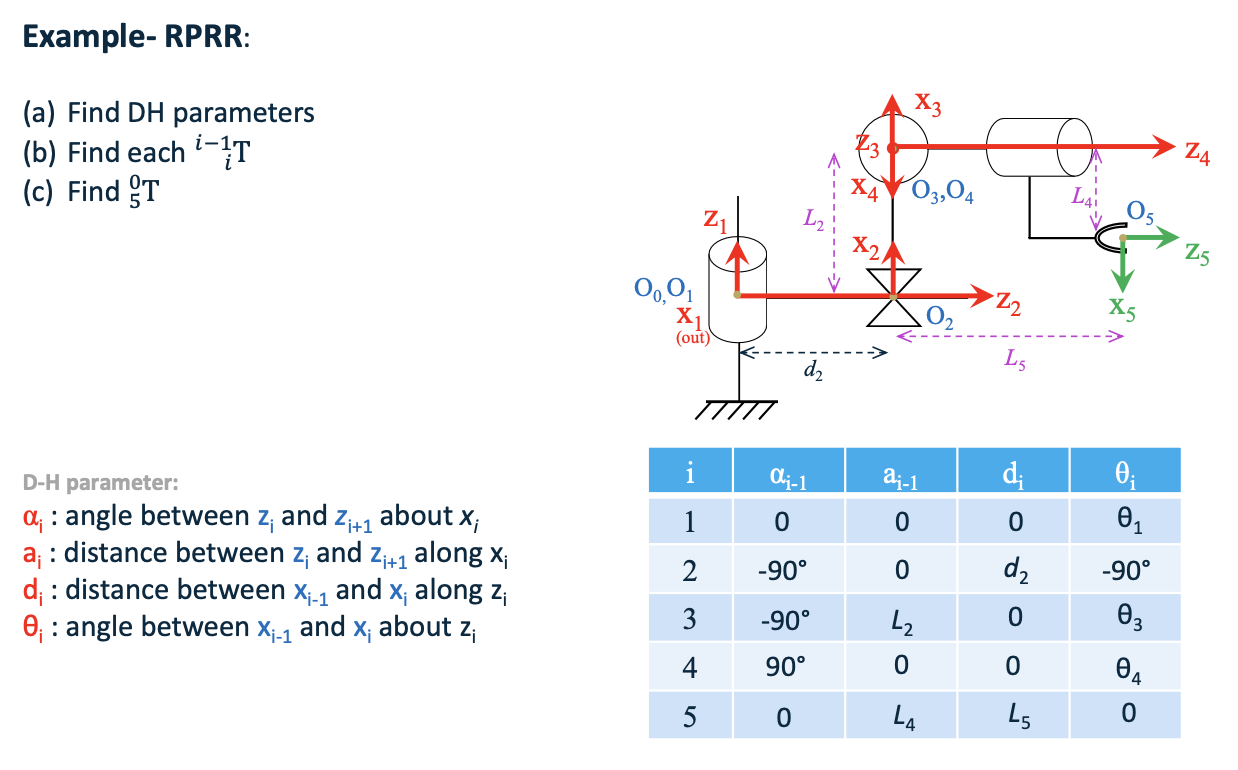
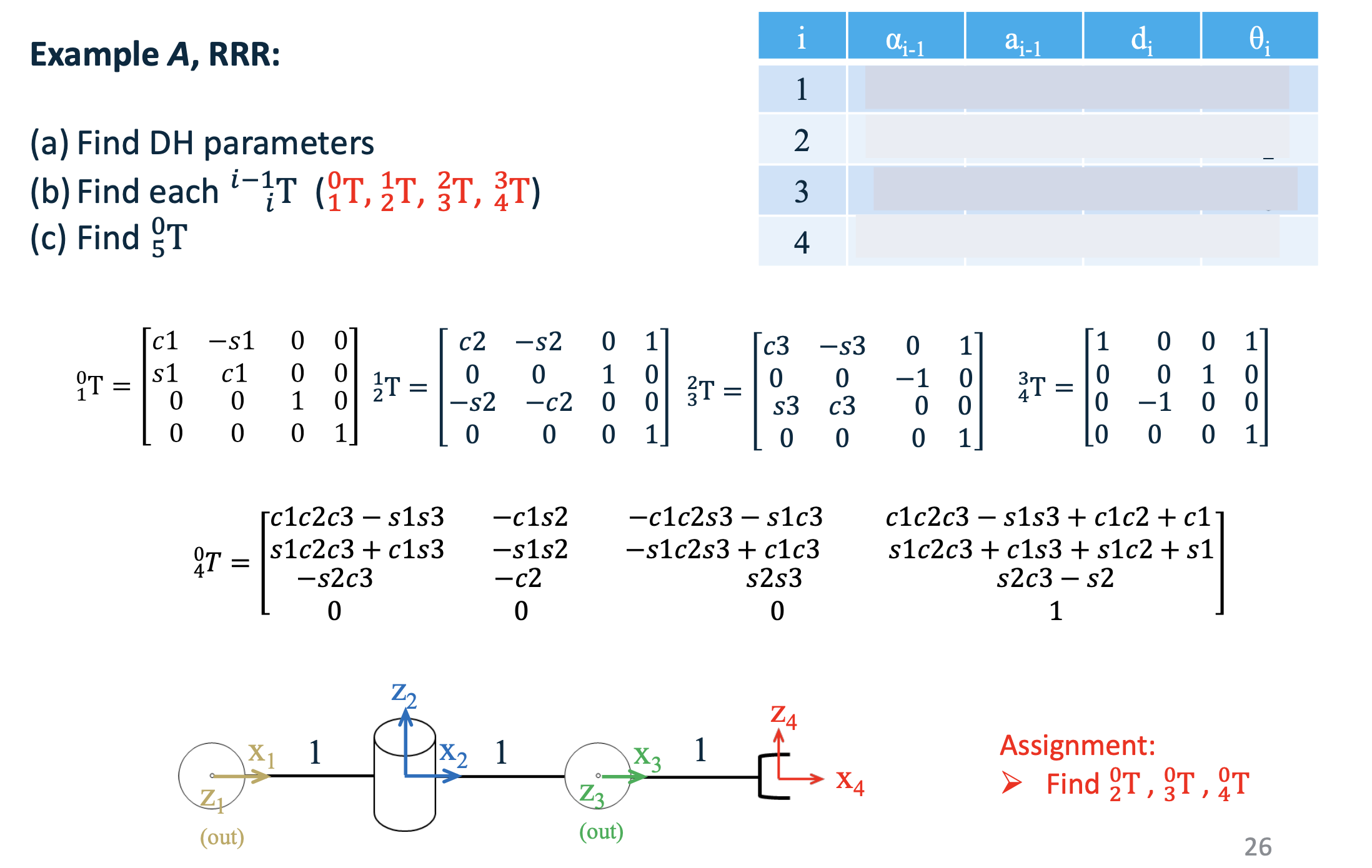
4 alpha a d theta (L5)
右手定则
右手法则是判断旋转角度正负的基础规则:
- 规则:用右手握住旋转轴,拇指指向轴的正方向(例如,$Z_i$轴的正方向),其余四指的弯曲方向为正旋转方向。
- 正角度:如果旋转是沿着右手四指弯曲的方向,则角度为正。
- 负角度:如果旋转是反方向(即与右手四指弯曲方向相反),则角度为负。
$\alpha_{i-1}$:绕$x_{i-1}$轴,从$z_{i-1}$到$z_i$的夹角。
$a_{i-1}$:沿$x_{i-1}$轴,从$z_{i-1}$到$z_i$的距离。(与x垂直)
$d_i$:沿$z_i$轴,从$x_{i-1}$到$x_i$的距离。
$\theta_i$:绕$z_i$轴,从$x_{i-1}$到$x_i$的夹角 (与z垂直)
Forward Kinematics:
\[{}^{i-1}_i T(\alpha_{i-1}, a_{i-1}, \theta_i, d_i) = R_x(\alpha_{i-1}) D_x(a_{i-1}) R_z(\theta_i) D_z(d_i)\] \[{}^{i-1}_i T = \begin{bmatrix} c\theta_i & -s\theta_i c\alpha_{i-1} & s\theta_i s\alpha_{i-1} & a_{i-1} c\theta_i \\ s\theta_i & c\theta_i c\alpha_{i-1} & -c\theta_i s\alpha_{i-1} & a_{i-1} s\theta_i \\ 0 & s\alpha_{i-1} & c\alpha_{i-1} & d_i \\ 0 & 0 & 0 & 1 \end{bmatrix}\]
\(^{i-1}_iT = ^{i-1}_RT\ ^R_QT\ ^Q_PT\ ^P_iT\)
eg.1.
eg.2. ??
eg.3.
eg.4.
模拟题
1.
D = 10cm = 100mm
d = 4cm = 40mm
P = 5MPa
1) $A_1 = \pi \times (D/2)^2 = 7850 mm^2$ $F_{push} = P \times A_1 = 39250 N$ 2) $A_2 = \pi \times(d/2)^2 = 6593mm^2$ $F_{pull} = P\times(A_1-A_2) = 32970N$
- DOF = 8
- rongyu = 8 - 6 = 2
0$90^{\circ}$ 绕轴旋转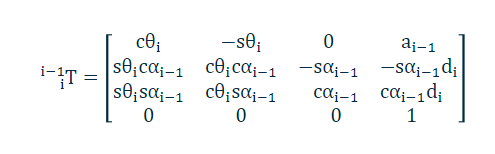
import numpy as np
def dh_transform_matrix(a, alpha, theta, d):
# Convert degrees to radians for trigonometric calculations
alpha_rad = np.radians(alpha)
theta_rad = np.radians(theta)
# Construct the transformation matrix
T = np.array([
[np.cos(theta_rad), -np.sin(theta_rad) * np.cos(alpha_rad), np.sin(theta_rad) * np.sin(alpha_rad), a * np.cos(theta_rad)],
[np.sin(theta_rad), np.cos(theta_rad) * np.cos(alpha_rad), -np.cos(theta_rad) * np.sin(alpha_rad), a * np.sin(theta_rad)],
[0, np.sin(alpha_rad), np.cos(alpha_rad), d],
[0, 0, 0, 1]
])
return T
# Given parameters
a = 0.5
alpha = 90
theta = 30
d = 0.2
# Calculate the matrix
transformation_matrix = dh_transform_matrix(a, alpha, theta, d)
transformation_matrix
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
from sympy import symbols, cos, sin, Matrix, pi, sqrt
def dh_transform_matrix_symbolic(a, alpha, theta, d):
# Convert degrees to radians
alpha_rad = alpha * pi / 180
theta_rad = theta * pi / 180
# Construct the symbolic transformation matrix
T = Matrix([
[cos(theta_rad), -sin(theta_rad) * cos(alpha_rad), sin(theta_rad) * sin(alpha_rad), a * cos(theta_rad)],
[sin(theta_rad), cos(theta_rad) * cos(alpha_rad), -cos(theta_rad) * sin(alpha_rad), a * sin(theta_rad)],
[0, sin(alpha_rad), cos(alpha_rad), d],
[0, 0, 0, 1]
])
return T
# Given parameters
a = 0.5
alpha = 90 # degrees
theta = 30 # degrees
d = 0.2
# Compute the symbolic transformation matrix
transformation_matrix_symbolic = dh_transform_matrix_symbolic(a, alpha, theta, d)
# Display the matrix
transformation_matrix_symbolic
- ? 障碍物规避 力优化
- $v = \sqrt 2 \ m/s$ $\omega = 0 \ rad /s$
This post is licensed under CC BY 4.0 by the author.