UL3
UL Part 3: Clustering
Overview over Part 3
We will…
- explain how mixture models can be used for clustering via the maximum a posteriori rule;
- explain how kernel density estimation can be used for clustering, via
- high density regions;
- density modes and the mean shift algorithm;
- discuss how to assess the goodness-of-fit of clustering techniques (being related to the choice of the number of clusters); particularly the elbow method, the gap statistic, silhouettes, and the Rand index.
Clustering
Clustering is the process of partitioning a data set $\mathcal{Y} = (y_1, \ldots, y_n)^T$, with $y_i \in \mathbb{R}^d$, into disjoint subsets $C_k, k = 1, \ldots, K$ (called clusters), so that those elements within each cluster are more similar to each other than elements in different clusters [J Sec 10.3].
Most clustering techniques accomplish this aim in two steps:
- Find the cluster centers;
- Assign all observations to one of the centers.
We have already seen two clustering techniques in Part I, which achieve this: $k$-means and $k$-medoids.
Recall: $k$-means for Wally’s data
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
wally.kmean <kmeans(wally.pts[,c("X","Y")], centers=3)
wally.kmean$centers
## X Y
## 1 6.443841 4.804348
## 2 10.978261 4.237319
## 3 2.497475 2.525568
head(wally.kmean$cluster)
## [1] 3 1 1 1 1 1
plot(wally.pts$X, wally.pts$Y,
col=wally.kmean$cluster, pch=16)
points(wally.kmean$centers,
col=c(1,2,3), pch=10, cex=2)
library(clue)
wally.kmed <kmedoids(dist(wally.pts[,c("X","Y")]), k=3)
wally.kmed$medoid_ids
## [1] 23 50 53
head(wally.kmed$cluster)
## [1] 1 2 2 2 2 2
plot(wally.pts$X, wally.pts$Y,
col=wally.kmed$cluster, pch=16)
points(wally.pts$X[wally.kmed$medoid_ids],
wally.pts$Y[wally.kmed$medoid_ids],
col=c(1,2,3), pch=9, cex=2)
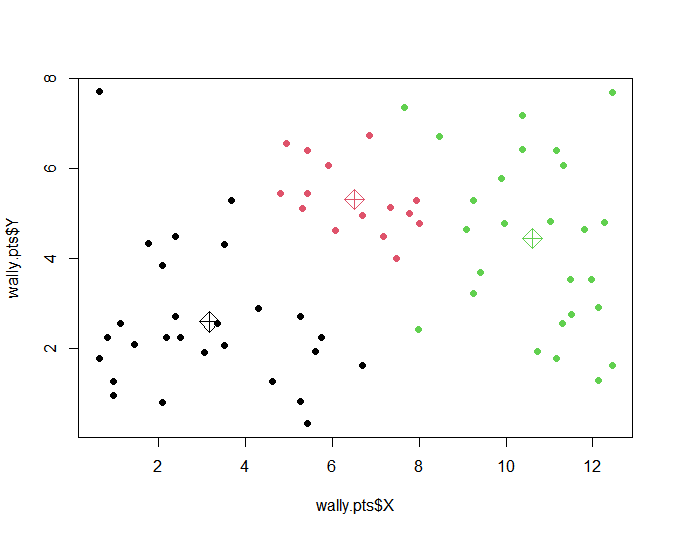
Mixtures and Clustering
It is clear that the mixture centers are natural candidates for cluster centers:
1
2
3
4
5
6
7
8
9
10
11
12
require(mixtools)
wally.mix <mvnormalmixEM(wally.pts[,c("X","Y")], k=3)
wally.mix$mu
[[1]]
[1] 3.172080 2.599816
[[2]]
[1] 6.507791 5.318982
[[3]]
[1] 10.612284 4.448306
(The R function mvnormalmixEM is a simple multivariate version of our implementation em, in contrast to the high-level function mclust).
How does the cluster assignment work?
Recall we do have the posterior probabilities of class membership:
1
2
head(round(wally.mix$posterior, digits=4))\
| comp.1 | comp.2 | comp.3 | |
|---|---|---|---|
| [1,] | 0.9953 | 0.0047 | 0.0000 |
| [2,] | 0.0295 | 0.9695 | 0.0010 |
| [3,] | 0.0173 | 0.9804 | 0.0023 |
| [4,] | 0.0116 | 0.9840 | 0.0044 |
| [5,] | 0.0477 | 0.9542 | 0.0010 |
| [6,] | 0.1364 | 0.8633 | 0.0003 |
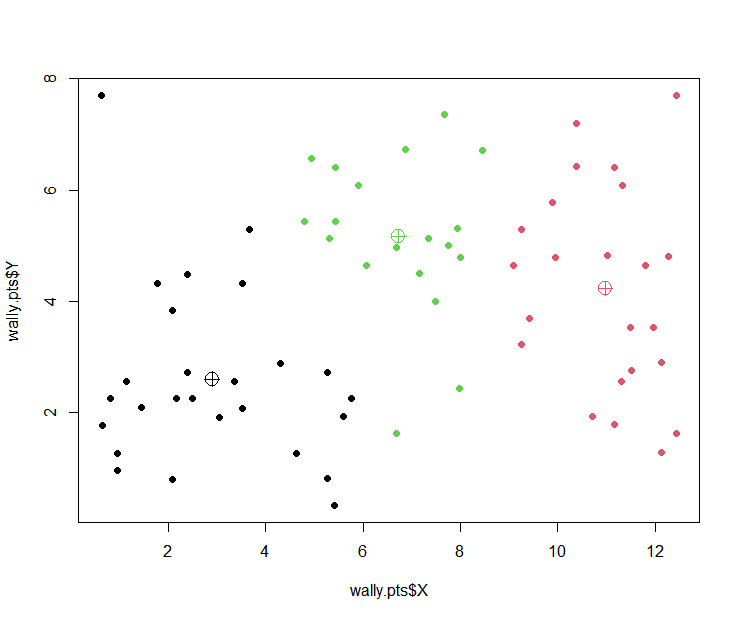
MAP clustering for mixtures
By the maximum a posteriori (MAP) rule, we allocate each observation to the mixture center to which it belongs with maximum probability [H Sec 14.3.7]:
1
2
3
4
5
6
7
8
9
10
wally.cluster <apply(wally.mix$posterior, 1, which.max)
wally.cluster
[1] 1 2 2 2 2 2 2 1 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
[29] 1 1 1 1 1 3 2 3 3 3 3 3 3 3 3 3 3 3 2 2 2 2 2 2 2 2 3 3
[57] 3 3 3 3 1 3 3 3 3 3 3 3
plot(wally.pts$X, wally.pts$Y, col=wally.cluster, pch=16)
mu <matrix(unlist(wally.mix$mu), ncol=2, byrow=TRUE)
points(mu, col=c(1,2,3), pch=9, cex=2)
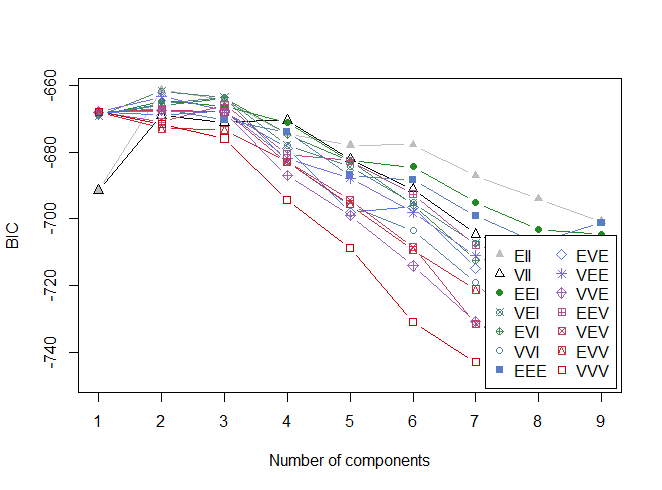
Clustering via mclust
Just as for the density estimation problem, mclust can be used for automatic determination of model complexity via BIC:
1
2
wally.mixx <Mclust(wally.pts[,c("X", "Y")])
plot(wally.mixx)
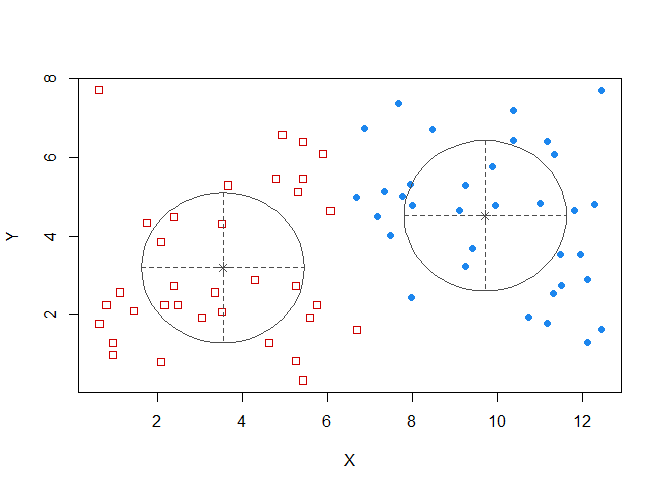
In this case, mclust chooses the most simple 2-component model (EII):
Resulting clustering according to MAP rule:
Connection between EM algorithm and k-means
The similar results using EM and k-means are not coincidental. The EM algorithm and k-means are very closely connected. Consider the EM algorithm, set all variances to $\sigma^2_k = 1$ and $p_k = \frac{1}{K}$ for all $k = 1, \ldots, K$. Instead of computing the individual cluster membership probabilities, we assign each data point to the most likely cluster
\[{argmax} _k P(G_{ik} = 1 | y_i) = {argmin} _k \| y_i - \mu_k \|^2.\]The weights $w_{ik}$ are now either 1 if $i$ is in cluster $k$ and 0 otherwise, equation (4) from Part 2 Slide 15 reduces to the cluster mean
\[\mu_k = \frac{1}{|C_k|} \sum_{i \in C_k} y_i.\][M Section 11.4.2.5]
Clustering through density estimation
Recall: Bivariate kernel density estimate (using for instance a bivariate Gaussian kernel, $K(x_1,x_2) = \frac{1}{2\pi} \exp\left{-\frac{1}{2}(x_1^2 + x_2^2)\right}$,
\[\hat{f}(x_1,x_2) = \frac{1}{nh_1h_2} \sum_{i=1}^{n} K\left( \frac{x_1 - x_{i1}}{h_1}, \frac{x_2 - x_{i2}}{h_2} \right)\]For instance, to use $h_1 = h_2 = 1$, we define a bandwidth matrix $[C \text{ Sec } 2.2]$
\[H = \begin{pmatrix} h_1^2 & 0 \\ 0 & h_2^2 \end{pmatrix} = \begin{pmatrix} 1^2 & 0 \\ 0 & 1^2 \end{pmatrix} = \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\]1
2
3
4
5
H = diag(1,2)
H
## [,1] [,2]
## [1,] 1 0
## [2,] 0 1
… and then execute:
1
2
3
4
5
require(ks)
wally <wally.pts[,c("X", "Y")]
wally.ks <kde(wally, H=H, gridsize=200)
plot(wally.ks)
points(wally.pts$X, wally.pts$Y, col=2)
or, as a perspective plot:
1
2
3
plot(wally.ks,
display="persp",
theta=30)
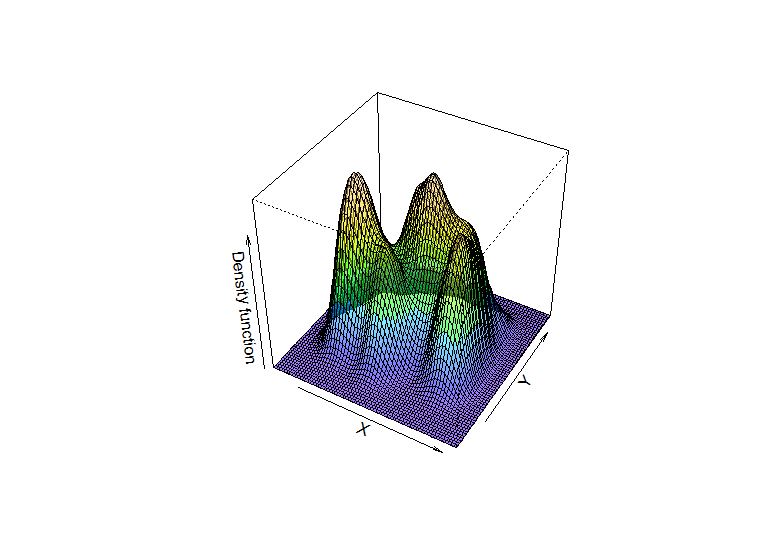 The images convey a notion that “density bumps correspond to clusters”.
The images convey a notion that “density bumps correspond to clusters”.
A traditional technique to quantify this idea are level sets, that is regions of the data domain which exceed a density threshold, say $c$:
\[\mathcal{L}(c) = \{x | \hat{f}(x) > c\}.\]For $c$ it is common to use a value such $c_\alpha$ such that
\[\int_{\mathcal{L}(c_\alpha)} \hat{f}(x) \, dx = 1 - \alpha.\][C Sec 6.1]
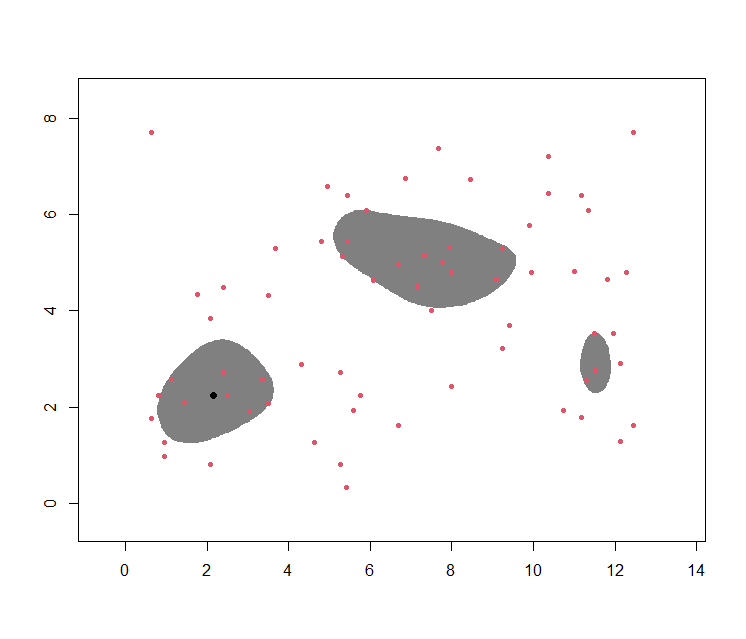
High density region
This latter concept is also referred to as a high density region (HDR): For instance, the following gives a 70% HDR:
1
2
3
4
5
6
7
8
9
require(hdrcde)
wally.hdr <hdr.2d(wally.pts$X, wally.pts$Y,
prob=0.7, kde.package="ks", h=c(1,1))
wally.hdr$alpha # cut-off constant c
##
## 70%
## 0.01447569
plot(wally.hdr, show.points=TRUE, pointcol=2)
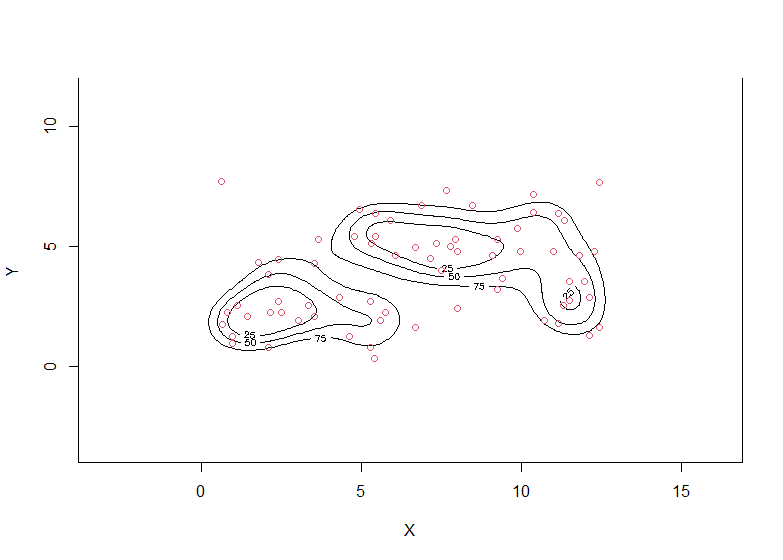
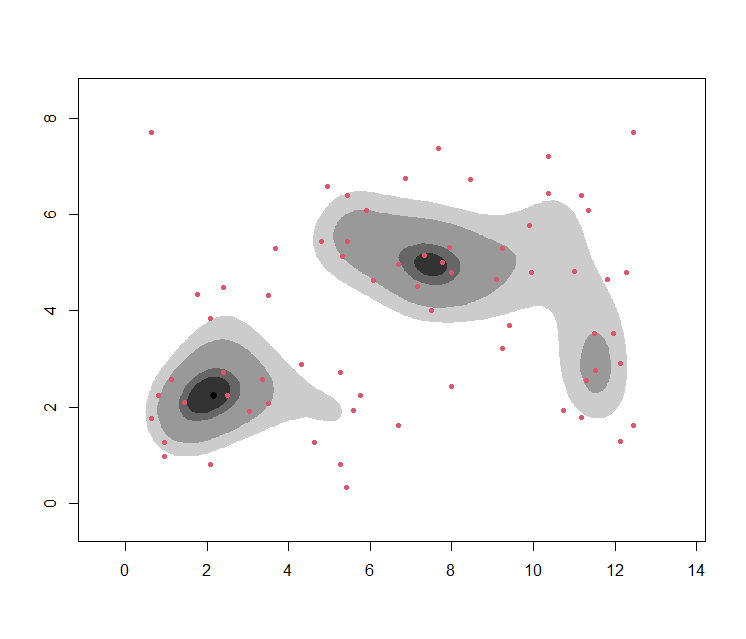
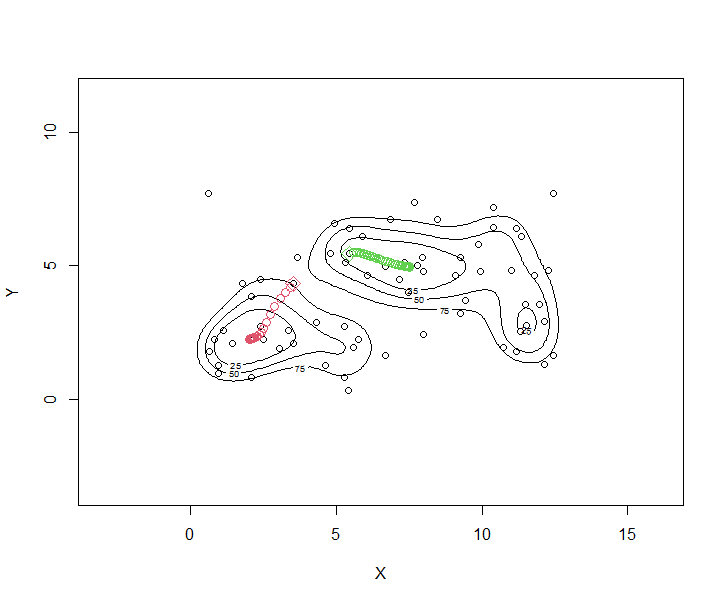
One can also do this for several values of $\alpha$ at once, then coinciding with the concept of a contour plot:
1
2
3
4
wally.hdr <hdr.2d(wally.pts$X, wally.pts$Y,
kde.package="ks", h=c(1,1),
prob=c(0.5,0.7,0.9,0.95))
plot(wally.hdr, show.points=TRUE, pointcol=2)
Limitations of HDRs
HDRs (or level sets) themselves have a few limitations:
The choice of the threshold $c$ is somewhat arbitrary.
The approach fails to qualify as a ‘clustering’ method in the sense of our definition, since not all data can be associated to a HDR (or the HDRs start overlapping and hence the allocation becomes ambiguous)
Hence, alternative ways of density-based clustering are desirable!
Overall mode
Observe the black dot in the previous images. This is the overall mode, i.e. the maximum of $\hat{f}$:
\[\text{Mode} = \arg \max_x \hat{f}(x).\]hdrcde computes this point simply through a grid search (which evaluates the density over a mesh of grid points, and then identifies that one yielding the maximum density).
1
2
3
4
wally.hdr$mode
[1] 2.166667 2.250000
#$
Local modes as cluster centers?
Conceptually, it appears sensible to identify cluster centers with all local modes.
However, a grid search is not very effective for this, since it is
- computationally very demanding (and may become actually infeasible if, say, $p \geq 3$)
- is not-so-easy to implement if one is interested in all local modes, not just the global one.
(Indeed, hdrcde cannot do this.)
Estimation of density modes
Systematic approach: Modes can be estimated as extremal points of the density; i.e. points with
\[\nabla \hat{f}(x) = 0.\]It turns out that, in order to execute this derivation efficiently, it is beneficial to rewrite the kernel $K(x)$ as $k(|x|^2)$, with Euclidean norm $|x|^2 = x_1^2 + \cdots + x_p^2$, where the profile $k: \mathbb{R} \to \mathbb{R}$ is a non-negative function such that
\[\int_{\mathbb{R}^d} k(\|x\|^2)dx = 1.\]For instance, for the multivariate Gaussian kernel, one has
\[k(u) = (2\pi)^{-p/2} e^{-u/2}\]and so
\[K(x) = (2\pi)^{-p/2} e^{-\|x\|^2/2}.\]With this formulation, one can write the density estimate as
\[\hat{f}(x) = \frac{1}{n|H|^{1/2}} \sum_{i=1}^{n} K(H^{-1/2}(x_i - x))\] \[= \frac{1}{n|H|^{1/2}} \sum_{i=1}^{n} k(\|H^{-1/2}(x_i - x)\|^2)\]and some algebra shows that its gradient is given by
\[\nabla \hat{f}(x) = -\frac{2}{n|H|^{1/2}} H^{-1} \sum_{i=1}^{n} k'(\|H^{-1/2}(x_i - x)\|^2)(x_i - x)\]Equating $\nabla \hat{f}(x) = 0$, one obtains the iterative equation
\[x = \frac{\sum_{i=1}^{n} k' \left( \| H^{-1/2}(x_i - x) \|^2 \right) x_i}{\sum_{i=1}^{n} k' \left( \| H^{-1/2}(x_i - x) \|^2 \right)}\]For the special case of a Gaussian profile, one has $k’(u) = -\frac{1}{2} k(u)$, and so
\[x = \frac{\sum_{i=1}^{n} k \left( \| H^{-1/2}(x_i - x) \|^2 \right) x_i}{\sum_{i=1}^{n} k \left( \| H^{-1/2}(x_i - x) \|^2 \right)},\]equivalently
\[x = \frac{\sum_{i=1}^{n} K(H^{-1/2}(x_i - x))x_i}{\sum_{i=1}^{n} K(H^{-1/2}(x_i - x))}.\]A mode of $\hat{f}$ corresponds to a point $x$ which solves (2).
This equation does not have an analytical solution. However, one can arrive at a solution by executing the right side of (2) iteratively, i.e. beginning from some starting point $x^{(\ell)}$, one iterates
\[x^{(\ell)} = \frac{\sum_{i=1}^n K(H^{-1/2}(x_i - x^{(\ell-1)}))x_i}{\sum_{i=1}^n K(H^{-1/2}(x_i - x^{(\ell-1)}))}\]One can show that
- the mean shift $x^{(\ell+1)} - x^{(\ell)}$ is proportional to $\frac{\nabla \hat{f}(x^{(\ell)})}{\hat{f}(x^{(\ell)})}$;
- the sequence of $x^{(\ell)}$ always moves in direction of the gradient;
- the sequence of $x^{(\ell)}$ converges to a local mode of $\hat{f}$.
Sequence of $x^{(\ell)}$ for two arbitrarily selected starting points; using fixed $(h_1,h_2) = c(1,1)$.
(code on next page)
1
2
3
4
5
6
7
8
9
10
11
12
13
require(LPCM)
x1 <c(wally.pts$X[10], wally.pts$Y[10])
ms.x1 <ms.rep(wally.pts[,c("X", "Y")], x=x1, h=1)
x2 <c(wally.pts$X[5], wally.pts$Y[5])
ms.x2 <ms.rep(wally.pts[,c("X", "Y")], x=x2, h=1)
plot(wally.ks)
points(wally.pts$X, wally.pts$Y)
points(wally.pts$X, wally.pts$Y)
points(x1[1], x1[2], col=2, pch=5, cex=1.5)
points(x2[1], x2[2], col=3, pch=5, cex=1.5)
points(ms.x1$Meanshift.points, col=2, cex=1.2)
points(ms.x2$Meanshift.points, col=3, cex=1.2)
Mean shift clustering
Mean shift trajectories starting from each individual observation.
1
wally.ms <ms(wally.pts[,c("X", "Y")], scaled=0, h=1)
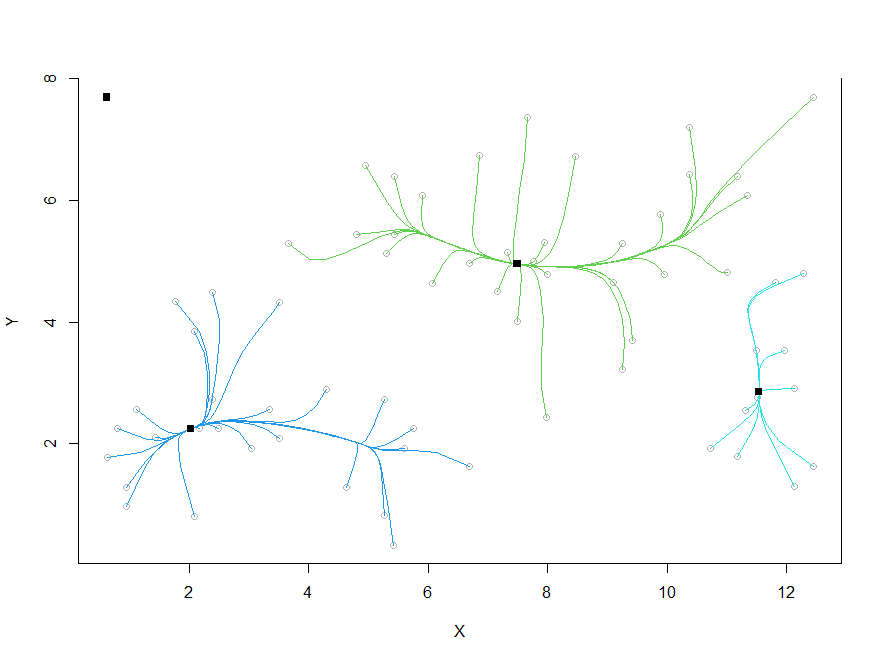 We see that once this process is complete, the clustering follows automatically: Each observation is assigned to that cluster to which its trajectory has converged [C Sec 6.2.2]:
We see that once this process is complete, the clustering follows automatically: Each observation is assigned to that cluster to which its trajectory has converged [C Sec 6.2.2]:
1
2
3
4
5
6
7
8
9
10
11
12
13
wally.ms$cluster.center
[,1] [,2]
[1,] 0.6316952 7.695737
[2,] 7.4926538 4.952212
[3,] 2.0306169 2.246337
[4,] 11.5383040 2.852186
wally.ms$cluster.label
[1] 1 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3
[31] 3 3 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 4 4 2 4 4 2
[61] 3 4 4 4 4 4 4
#$
Goodness-of-fit assessment
We have seen several ways of clustering a given data set. How can we say whether a certain clustering outcome has been more successful than another one?
Specifically, we would be interested in comparing
- clusterings from a particular technique, for different k;
- results from different clustering techniques between each other.
1
2
3
4
5
6
7
wally <wally.pts[,c("X","Y")]
tot.withinss <rep(0,15)
for (k in 1:15){
tot.withinss[k] <kmeans(wally,k)$tot.withinss
#$
}
plot(tot.withinss, type="b", main="Total-within sum of squares")
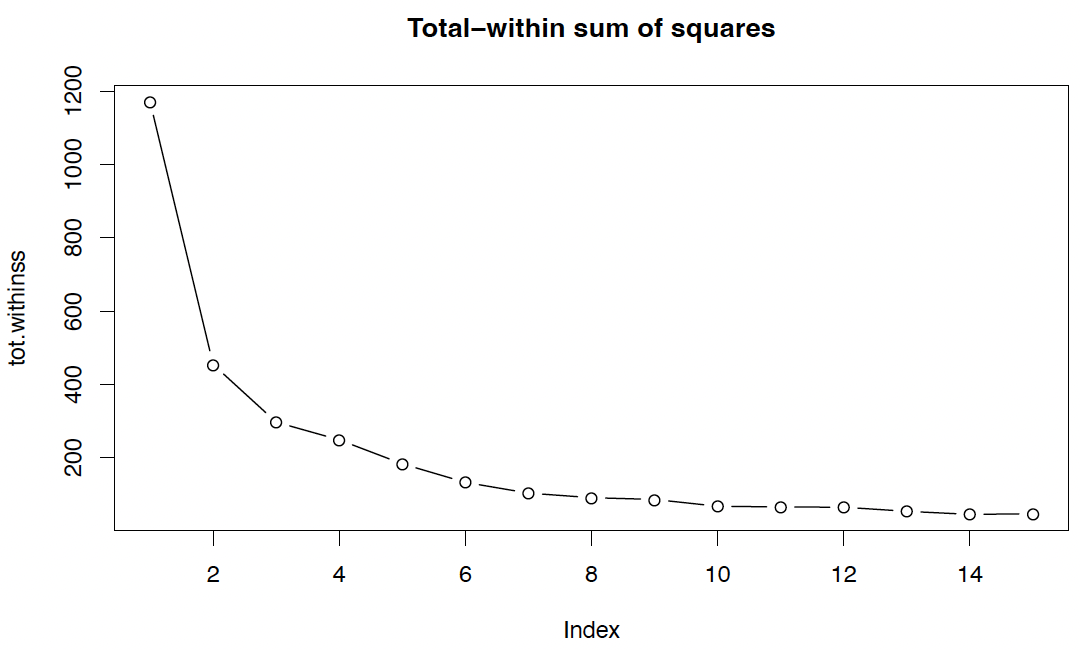
We see that minimizing this criterion is not a constructive strategy.
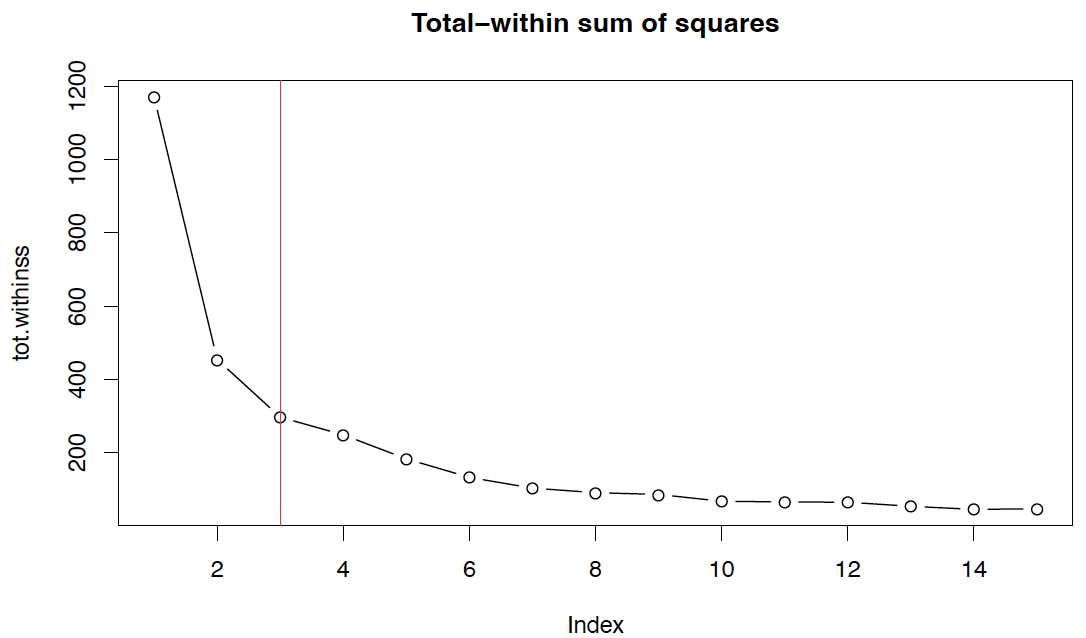
However, a potential solution is given by the elbow method, which defines the ‘elbow’ (bend, kink) from which on an increase of $k$ only gives ‘slow’ improvement.
Here, presumably selects $K = 3$.
1
2
plot(tot.withinss, type="b", main="Total-within sum of squares")
abline(v=3, col=2)
Gap statistics
Clearly, the elbow method is somewhat ambiguous and subjective!
An approach to formalize this concept through a proper statistical test is the gap statistics, which tests, through the bootstrap, whether the decrease in log-total within-sum of squares is larger than could be expected purely by chance.
1
2
3
require(cluster)
wally.gap<clusGap(wally,FUN=kmeans, K.max = 5, nstart=20, B = 100)
plot(wally.gap)
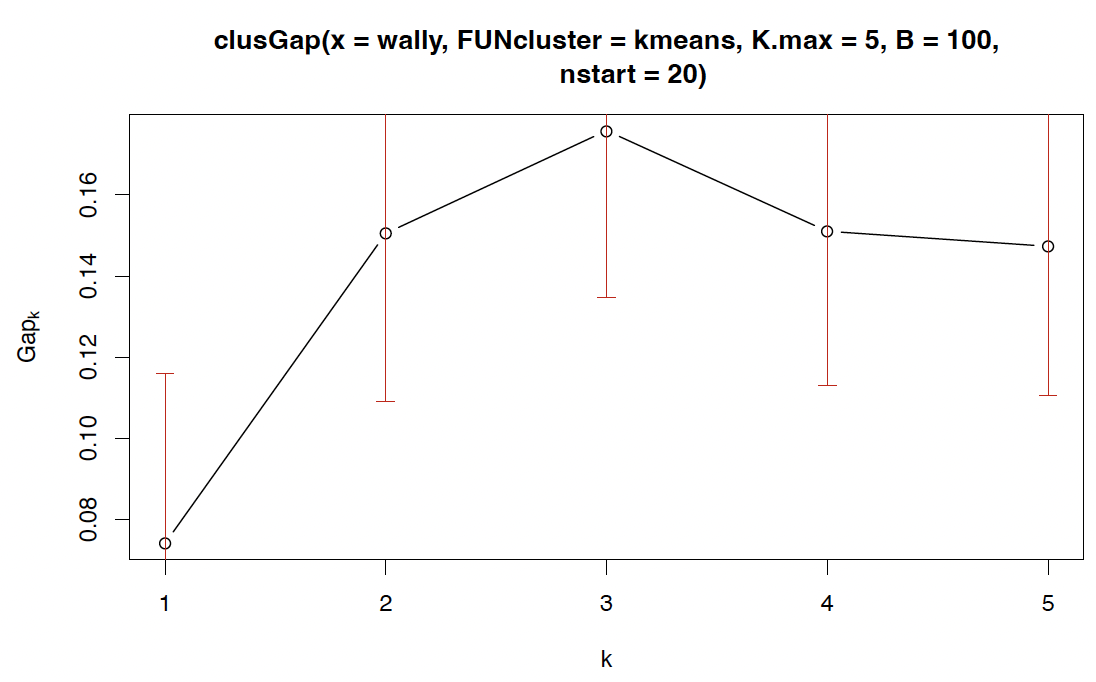
What is displayed here is the ‘gap curve’; i.e. the difference between the expected and the observed log-total within-sum of squares, over different K.
Sensible values of K will produce large values of the gap statistic. Here the maximum is at $K = 3$.
[H Sec 14.3.11] suggest a slightly more complex way of selecting K: Identify the smallest K for which the gap statistic $G_K$ exceeds at least the lower end of error bars (red) at $G_{K+1}$.
Here, this would select $K = 2$ (so the increase from $K = 2$ to $K = 3$ is deemed coincidental).
Silhouettes
A differently motivated measure of goodness-of-fit for a given clustering is obtained by the following strategy:
For each observation $x_i, i = 1, \ldots, n$, identify
- a (dissimilarity) measure $a(x_i)$ of how well $x_i$ fits into its assigned cluster;
- a (dissimilarity) measure $b(x_i)$ of how well $x_i$ would fit into one of the other clusters;
- a measure $s(x_i)$ (‘silhouettes’) of how much smaller $a(x_i)$ is than $b(x_i)$;
Finally, use the average over $s(x_i), \, i = 1, \ldots, n$ to measure the goodness-of-fit (larger is better).
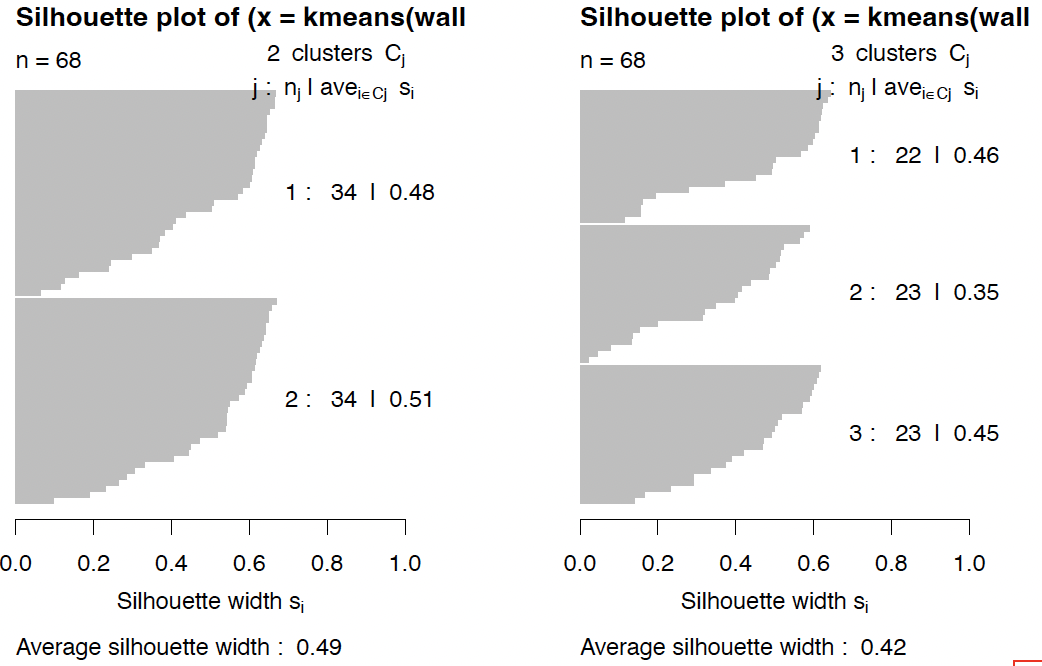
This concept has been applied (mainly for k-means) in the form of silhouette plots.
1
2
3
4
5
require(cluster)
par(mfrow=c(1,2))
for (k in 2:3){
plot(silhouette(kmeans(wally,k)$cluster, dist(wally)))
}
A common choice for these expressions is
\[a(x_i) = \frac{1}{|C(i)| - 1} \sum_{x_j \in C(i), j \neq i} D(x_i, x_j)\] \[b(x_i) = \min_{k: C_k \neq C(i)} \frac{1}{|C_k|} \sum_{x_j \in C_k} D(x_i, x_j)\] \[s(x_i) = \begin{cases} \frac{b(x_i) - a(x_i)}{\max\{a(x_i), b(x_i)\}} & \text{if } |C(i)| > 1 \\ 0 & \text{if } |C(i)| = 1 \end{cases}\]where $D$ is some dissimilarity such as the Euclidean distance, and $C(i)$ denotes the cluster which includes $x_i$.
The silhouette values $s_i \equiv s(x_i)$ can be interpreted as follows:
- Values of $s_i$ close to 1 mean that case $i$ is well clustered;
- values close to 0 mean that case $i$ could equally well be assigned to another cluster;
- negative values mean that case $i$ would be better assigned to another cluster.
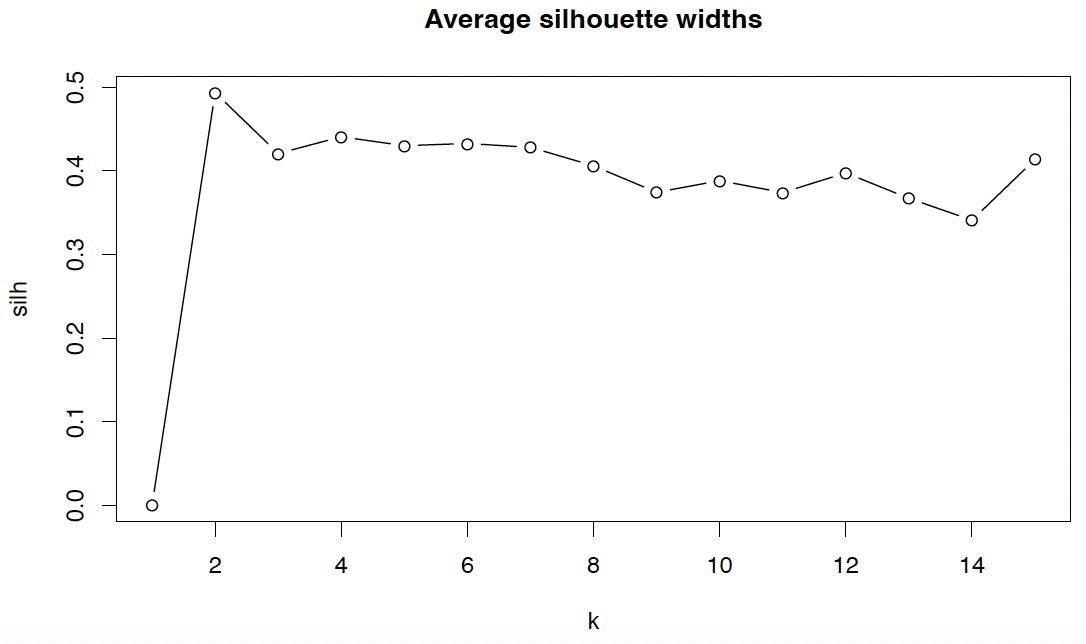
Often, a summary statistic is more useful. Most frequently used is the average silhouette width
\[S = \frac{1}{n} \sum_{i=1}^{n} s_i.\]1
2
3
4
5
6
7
8
9
silh <rep(0,15)
for (k in 2:15){
silh[k] <summary(
silhouette(
kmeans(wally,k)$cluster,
dist(wally))
)$avg.width
}
plot(silh, type="b", main="Average silhouette widths", xlab="k")
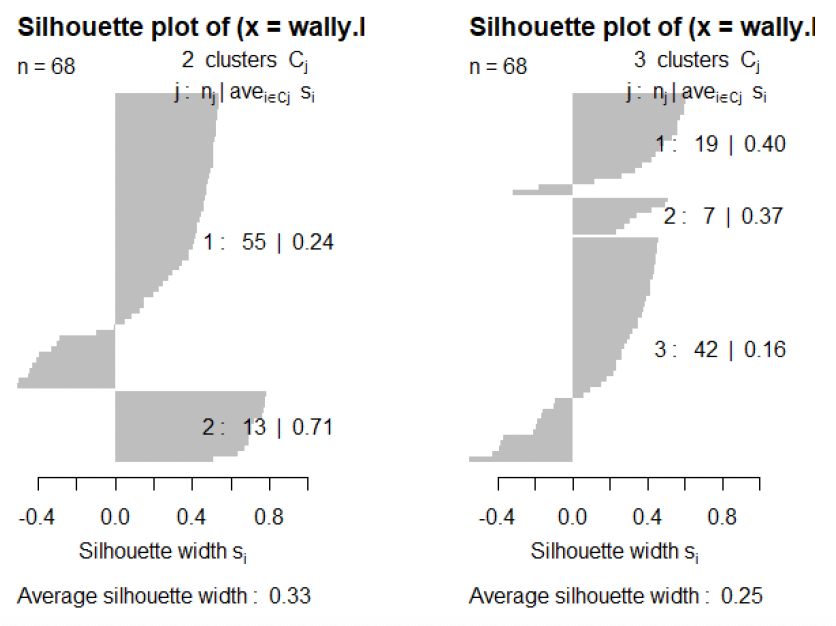
Silhouettes can in principle also be applied to other clustering techniques, although this is not very common:
1
2
3
4
5
6
par(mfrow=c(1,3))
for (k in 2:3){
wally.kmix <mvnormalmixEM(wally, k=k)
wally.kcluster <apply(wally.kmix$posterior, 1, which.max)
plot(silhouette(wally.kcluster, dist(wally)))
}
Other clustering indexes
Similar indexes to the average silhouette width (which define some criterion based on ratios of some sort of intraand between-cluster distances) have been proposed in large number, including
the Dunn index: the ratio of the smallest distance between observations not in the same cluster to the largest intra-cluster distance (positive index, with infinity corresponding to best clusterings).
the Davies-Bouldin index: a ratio of a measure of scatter within the cluster and the separation between clusters (positive index, with small values corresponding to good clusterings).
Rand index
The Rand index is sometimes cited as a criterion for the assessment of quality of clusterings, even though it is in fact only a measure to compare two given clusterings.
That is, it can only assess the quality of a given clustering if the true labels are known.
Given a data set $\mathcal{Y} = (y_1, \ldots, y_n)^T$, with $y_i \in \mathbb{R}^p$, and two clusterings (partitions) $C_k, k = 1, \ldots, K$ and $C_\ell, \ell = 1 \ldots L$.
The Rand index computes the proportion of times that the two clusterings have made the same decision, over all possible pairs $(y_i, y_j)_{1 \leq i,j \leq n}$:
\[RI = \frac{a + b}{\binom{n}{2}}\]where
- $a$ is the number of times a pair $(y_i, y_j)$ belongs to the same cluster in both clusterings;
- $b$ is the number of times a pair of elements are in different clusters in both clusterings.
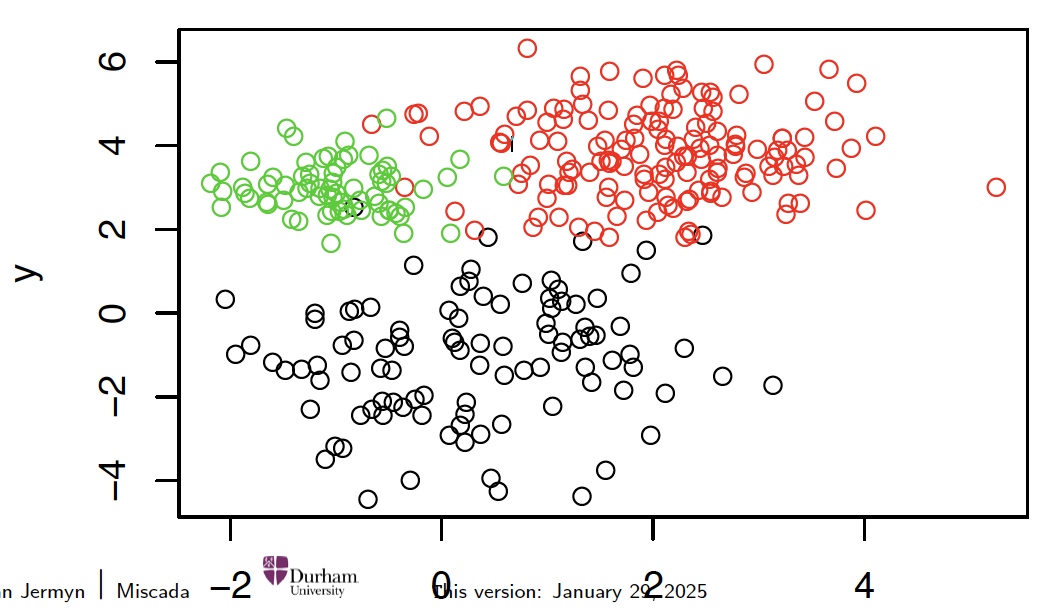
Take the simulated data with known training labels:
1
2
3
4
5
6
7
intro.dat <- read.table(
"http://www.maths.dur.ac.uk/~dma0je/Data/intro-asml2.dat",
header=TRUE
)
intro.labels <- read.table("http://www.maths.dur.ac.uk/~dma0je/Data/intro-asml2-labels.dat", header=TRUE)$x
plot(intro.dat, col=intro.labels)
1
k3 <kmeans(intro.dat, centers=3)
1
2
3
require(fossil)
rand.index(intro.labels, k3$cluster)
# [1] 0.9274491
1
2
3
4
5
require(mixtools)
intro.mix <mvnormalmixEM(intro.dat , k=3)
intro.cluster <apply(intro.mix$posterior, 1, which.max)
rand.index(intro.labels, intro.cluster)
# [1] 0.9538989
The clustering based on the mixture model yields a higher similarity to the true labels than the k-means result (this is not surprising since this data set was generated from a Gaussian mixture!)
One can also compare the similarity of two clustering outcomes:
1
2
rand.index(k3$cluster, intro.cluster)
[1] 0.9328762
‘Chance-corrected’ version: Adjusted Rand index (not further discussed here; available in mclust).
Practical 3
In the third lab session (fetch Practical 3 on Jupyter), we will:
- look into a detailed ‘case study’ illustrating how to use cluster analysis for image segmentation;
- learn how to ‘open’ an image in R and prepare it for further analysis;
- explain how the problem of segmentation relates to the question of clustering;
- explain how different clustering techniques can be used to address this problem.